智能裝置CAN轉以太互連通信方案設計

1 系統結構
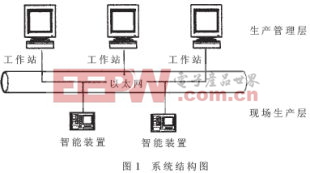
本系統間隔單元設備采用嵌入式工業以太網技術,從而使智能裝置真正成為工業以太網上獨立的節點,保證了智能單元設備和上位機系統通信快速、完全、可靠,為遠程管理智能裝置創造條件。通信接口卡(Master板)與上位機信息交換是建立在TCP/IP協議上的國際電力行業標準的IEC104規約,采用Server/Client通信服務模式,Master板作服務器可以支持多客戶同時登入。系統結構如圖1所示。
2 裝置內部結構設計
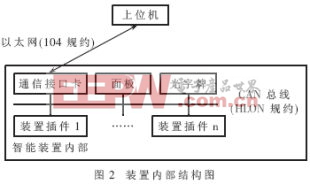
智能裝置內部各功能模塊采用高速現場總線CAN網絡相連,總線不出裝置,功能模塊之間的數據交互快速可靠。在組幀上采用HLON規約,并使用CAN 2.0B擴展模式,為了保持協議標準化,在HLON規約的基礎上封裝了IEC101規約。其內部結構如圖2所示。
3 硬件設計
通信接口卡使用雙處理器結構。一部分是使用Motorola公司DSP56F807芯片作為接口卡的CAN通信管理模塊;另一部分是使用Rabbit2000核的RCM2100集成卡作嵌入式網關和CAN到ETHERNET規約轉換模塊。通信接口卡硬件邏輯框圖如圖3所示。
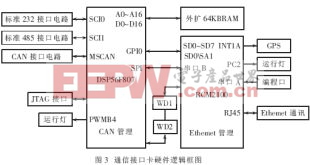
通信接口卡采用主從工作方式,即DSP56F807作為主處理器,利用其自帶的MSCAN模塊負責管理CAN通信。DSP外擴64KBRAM,用于存儲數據。RABBIT2000作為從處理器,負責進行CAN到ETHERNET轉換,并負責管理裝置同后臺的以太網通信。RABBIT2000與DSP接口方式采用并行接口。板上還設有RS485、RS232接口,可以用于PC調試或與后臺連接。DSP56F807采用3.3V電源供電,RABBIT2000采用5V電源供電,經測試只要輸入電壓達到2.1V,RABBIT2000即認為高電平,DSP56F807輸出高電平在2.1V以上;DSP56F807 I/O可以接受5V信號,所以DSP與RABBIT2000可以直接相連,無須進行電平轉換。
(1)DSP56F807主處理器
DSP數據總線D0~D15地址總線A0~A15,外擴64KRAM存儲數據, 、
、 連接外擴RAM的讀、寫允許端,
連接外擴RAM的讀、寫允許端, 作為外擴RAM 片選信號。DSP的GPIOB口連接從處理器的SD0~SD7,GPIOD0、GPIOD1連接從處理器的SA0、SA1,GPIOD2、GPIOD3連接從處理器的寫、讀允許端(
作為外擴RAM 片選信號。DSP的GPIOB口連接從處理器的SD0~SD7,GPIOD0、GPIOD1連接從處理器的SA0、SA1,GPIOD2、GPIOD3連接從處理器的寫、讀允許端( )。一個中斷
)。一個中斷 連接從處理器的
連接從處理器的 ,作為從處理器中斷申請。DSP的PWMB2連接MAX705的WDI作為外部硬件看門狗喂狗信號,PWMB4連接發光二極管作為DSP的運行指示燈。用DSP的兩個SCI模塊RXD0、TXD0、RXD1、TXD1做成標準RS-232、485接口。引出DSP的JTAG口用于調試,用DSP的MSCAN模塊和82C250作為CAN通信端口。通過DSP的SPI口與RABBIT2000同步串口B相連,作為另一種接口方式。DSP采用3.3V電源供電。
,作為從處理器中斷申請。DSP的PWMB2連接MAX705的WDI作為外部硬件看門狗喂狗信號,PWMB4連接發光二極管作為DSP的運行指示燈。用DSP的兩個SCI模塊RXD0、TXD0、RXD1、TXD1做成標準RS-232、485接口。引出DSP的JTAG口用于調試,用DSP的MSCAN模塊和82C250作為CAN通信端口。通過DSP的SPI口與RABBIT2000同步串口B相連,作為另一種接口方式。DSP采用3.3V電源供電。

tcp/ip相關文章:tcp/ip是什么






評論