基于多MCU的高頻電刀研制

摘要:針對醫用高頻電刀系統結構較復雜,需要采集和控制的信息量大的難點,提出了一種基于多MCU結構的醫用高頻電刀設計及其與之配套的自動測試系統。主控制、射頻控制、數據采集、用戶界面分別采用獨立的MCU控制。MCU之間分工協同工作,通過串行接口USART和SPI,并根據約定的通信協議進行通信;射頻產生電路由負責射頻控制的MCU控制復雜可編程邏輯器件(CPLD),從而產生控制功率驅動電路的方波。經測試,該系統輸出頻率穩定,系統參數靈活可調,且提高了高頻電刀的實時性和安全性。
關鍵詞:高頻電刀;多MCU;USART;SPI;CPLD
0 引言
高頻電刀是一種利用高頻電壓電流的熱效應進行手術切割的電外科器械,一般具有電切和電凝的功能;相對于機械手術刀具有準確快捷、微創治療的優點;其基本原理是通過在手術電極產生0.3~1 MHz頻段內的高壓射頻信號對人體組織進行加熱,從而實現組織切割和凝固。本文設計了一種基于多MCU結構的醫用高頻電刀,主要介紹系統的電路拓撲結構、各MCU的分工、MCU之間的通信方式和協議、射頻產生電路、功率電路及其測試系統的設計。
1 高頻電刀的工作原理和設計原則
1.1 高頻電刀工作原理
因為生物組織是導電體,當有電流通過人體組織時,可同時產生熱效應、電離效應和法拉第效應;低于100 kHz的交流電會產生有限的如肌肉痙攣、疼痛、心室纖維顫動等(法拉第效應);當電流頻率達到100 kHz以上時,法拉第效應明顯減少;當高于300 kHz時可忽略不計;而當頻率達到1.5 MHz以上的電流通過人體時,對肌體的刺激作用已非常微弱,高頻電流雖對人體已經沒有刺激作用,但會使具有一定阻抗的人體組織產生熱效應;高頻電刀就是利用高頻電流的只產生熱效應而不產生電離和法拉第效應這一特性制成的。它將高頻電流聚集于電刀電極的尖端,由于尖端與人體接觸面積小、電流密度大,會產生較高能量如果電流是持續的高頻電流,細胞受到的熱量會逐漸增加,當熱量達到一定程度時,接觸處的細胞會受熱破裂,細胞破裂后其水份成為水汽,帶走細胞上的熱量,利用手術電極上高密度的高頻電流使人體組織切除或分開,這就是電切;如果電流是間斷的高頻電流,產生的熱效應也是間斷的,細胞內部水份得不到足夠的高溫,細胞就不會破裂,但會慢慢脫水,細胞就會干枯凝固,這就是電凝;電切和電凝是高頻電刀的2種基本工作模式。
1.2 高頻電刀的設計原則
從高頻電刀的工作原理可知,其安全性至關重要。高頻電刀的輸出還應有頻譜要求,在工作時要求輸出高頻電流的頻譜越窄越好,最好是一單根譜線,故要求電刀輸出波形為純凈的正弦波。另外,為在不同人體組織上得到好的作用效果,對輸出功率要進行控制,并且在工作時應根據工作點人體電阻的變化輸出不同的功率,即按照預定的功率輸出曲線輸出功率,好的電刀功率曲線寬而平坦,而差的電刀則是尖峰狀功率曲線。
2 基于多MCU的系統設計
2.1 設計原理和電路拓撲圖
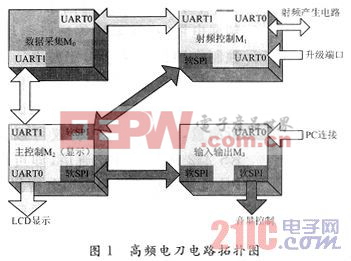
由于醫用高頻電刀的系統結構較復雜,需要采集和控制的信息量大,同時為了提高系統的安全性和實時性,本系統采用多MCU控制的設計。MCU選用基于RISC結構的8位低功耗AVR單片機ATmega128。其先進的指令集以及單周期指令執行時間可以緩減系統在功耗和處理速度之間的矛盾;而且具有包括USART、SPI串行通信接口以及8通道10位AD轉換等在內的豐富外設。MCU之間分工協同工作,通過ATmega128自帶的USA RT和SPI接口通信。各個MCU的連接拓撲圖如圖1所示,其中:負責數據采集和電刺激輸出的MCU定義為M0,負責射頻與控溫的MCU定義為M1,負責顯示界面與整體控制的MCU定義為M2,負責用戶輸入和PC通信的MCU定義為M3。基于多MCU的設計使數據采集、射頻控制、人機界面分開,保證了高頻電刀控制的安全性和實時性,并且人機交互更加順暢。
2.2 通信方式和協議
本系統采用多MCU分工協同工作,工作過程中MCU之間需要實時和大量的數據傳輸。本系統的通信是基于串行通信SPI和USART的。SPI接口是Motorola首先提出的全雙工三線同步串行外圍接口,采用主從模式(Master Slave)架構。UART定義了數據傳輸過程中如何打包解包以及如何做可靠性處理,屬于通信協議層,可以實現全雙工傳輸和接收;包括了RS 232,RS 423,RS 422和RS 485等接口標準規范和總線規范。 SPI和USART都可以實現全雙工通信。
在本系統中,UART通信使用RS 232接口標準,與TTL電平相比,可以有效地增加通信距離。握手方式采用硬件握手,DTR/DSR用于表示系統通信就緒,而RTS/CTS用于單個數據包的傳輸。M0使用2個UART異步串行口,均帶有DTS(輸入)和DTR(輸出)檢測。M1使用2個均帶有DTS和DTR的異步串行口,另加一個SPI同步串行口。M2使用一個UART口與M0進行通信,當顯示設備為LCD屏時,使用第2個UART口;另外,M2使用固定的軟SPI口與M3進行通信。M3使用2個UART串行口與外部進行通信,使用一個軟SPI口與M2進行通信,另外加一個軟SPI口進行聲音控制,阻抗不同則聲音的頻率不同,醫生通過聲音即可判斷電極進入組織的深度。定義所有的異步串行口均為:8位數據位,無校驗位,1位停止位。系統各MCU之間通信機制如下:
握手過程:
(1)開機,M0~M3均進行自檢,MCU板子獲取數據后,進入等待模式;
(2)M2進入初界面后,對每個MCU依次發送獲取軟件版本的命令,如果每個MCU都在1 s時間內返回回應幀則認為連接無問題,自檢通過;
(3)M2向M0獲取各種電極信息,存入全局變量中,握手成功。
通信過程:
(1)定義M2任何時候均為主機,相對于M2,M0、M1和M3均為從機。發送查詢楨后,從機均以中斷方式返回查詢數據,主機應檢驗該數據楨是否為所需要的,數據是否正確;
(2)M0和M1之間,M1是主機,M0是從機,以中斷方式響應。









評論