基于CAN的大客飛機航電系統局域網通信設計

摘要:提出一種基于CAN總線的大客飛機航電系統局域網通信仿真系統設計方法,探討了CAN總線在航電總線中應用的優點及可能性。仿真系統硬件通過CAN總線通信卡及工控機實現,軟件通過模塊化設計方法實現。通信仿真系統實現了各子系統相關數據的傳送、處理,以及相關信息的實時顯示。應用表明,局域網通信系統工作正常、性能良好,能實現測試設備之間高速率的數據傳輸與轉換,具有良好的實用價值。
關鍵詞:大客飛機;CAN總線;局域網通信;CAN總線通信卡
0 引言
在大客飛機機載設備中,大量信息在系統與系統、系統與部件之間傳遞。為了讓機載設備之間完成實時、準確地通信,盡量減少航電系統電氣連線的復雜性,提高航電系統控制的靈活性,而能與其他子系統進行合理通信,必須選用一種合適的總線承擔此任務。CAN(Controll er Area Network)總線以其獨特的設計思想、優良的性能和極高的可靠性,足以完成上述任務,所以選用CAN總線來開發航電系統局域網通信仿真系統,這是CAN總線在航空領域應用的一次新的嘗試。
文中采用CAN總線仿真大客飛機航電系統局域網通信,是以CAN總線為傳輸總線,以工控機作為子系統仿真機的通信系統,采用總線型拓撲結構。其目的在于仿真飛機某些子系統的功能、總線通信情況,測試整個仿真系統的工作情況,重點檢驗系統工作狀態和邏輯時序的正確性,為CAN總線在航空領域的應用提供案例。
1 仿真系統的功能
CAN總線通信仿真系統分為六個子系統,仿真系統需要實現子系統之間實時準確的數據傳輸,根據用戶需求設置系統的通信參數,如通信速率、通信方式、發送方式等,顯示系統參數、本機參數、通信參數,實時顯示系統接收的最新數據,保存通信記錄。
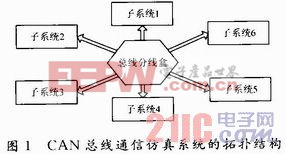
CAN總線通信仿真系統由硬件和軟件兩部分組成。硬件主要包括PCI_CAN通信接口板、仿真計算機、總線分線盒及CAN總線等,采用總線型拓撲結構。軟件主要任務是根據相應工作狀態對數據進行傳輸、處理以及顯示。CAN總線通信仿真系統的拓撲結構如圖1所示。
2 仿真系統的硬件設計
CAN總線通信卡是硬件設計的關鍵部分,主要由CAN總線接口部分、通信控制部分和PCI總線接口部分三大部分組成。電路設計原理框圖如圖2所示。
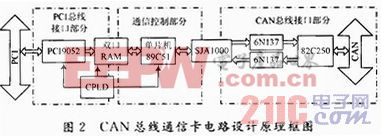
PCI協議芯片采用PCI9052,采用64 MB雙口RAM緩存,用復雜可編程邏輯器件CPLD和單片機89C51來控制數據的讀寫,以保證數據的完整性和時序性;CPLD采用EPM7128;CAN控制器采用SJA1000;收發器采用82C250;6N137用作光耦隔離。
2.1 CAN總線接口部分
CAN總線通信卡總線接口電路如圖3所示。
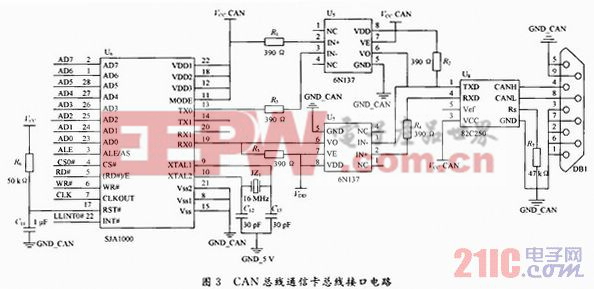
CAN總線通信控制部分主要由CAN總線控制器SJA1000、高速光耦6N137和CAN驅動器PCA82C250組成。為了增強CAN總線節點的抗干擾能力,CAN控制器SJA1000的通信引腳TX0和RX0并不是直接與PCA82C250的TXD和RXD相連,而是在中間加入一級高速光耦6N137,這樣能很好地實現總線上各個CAN節點之問的電氣隔離,增強了抗干擾能力。光耦電路用的2個電源VCC和VDD必須隔離。電源的完全隔離可采用小功率電源隔離模塊實現。這雖然增加了接口電路的復雜性,但卻提高了節點的穩定性和安全性。PCA82C250的RS腳上接一個斜率電阻。電阻大小可以根據總線通信速度適當調整,一般在16~140 kΩ之間。SJA1000的初始化由單片機來完成,單片機通過控制SJA1000實現數據的接收和發送等通信功能。AD0~AD7連接到單片機的P0口,CS連接到單片機的P2.7口,P2.7為0時,單片機CPU的片外存儲器地址可選中SJA1000,CPU通過這些地址可對SJA1000執行相應的讀/寫操作。SJA1000的RD,WR,ALE分別與單片機的相應引腳相連,SJA1000的INT接單片機的INT0,單片機也可通過中斷方式訪問SJA1000。







評論