基于Android的GPRS的車載通信終端設計方案

摘 要:隨著車聯網技術的不斷發展和應用,GPRS日臻普及和嵌入式系統的崛起,車輛網通信終端變得越來越智能化。
本文引用地址:http://www.j9360.com/article/153965.htm采用Android操作系統和MD231GPRS模塊,以S3C6410嵌入式處理器為核心,設計了一個基于車輛故障參數的GPRS遠程傳輸的通信終端,能實現數據的處理、遠程傳輸。通過通信終端能對車輛狀態進行實時監控,出現故障時,可以根據故障數據進行準確的修理,減少車輛的拋錨時間。
關鍵詞:Android;GPRS;ARM;通信終端
0 引 言
隨著通信技術的發展,通信終端由單一的通話工具變成信息綜合處理平臺,成為辦公、野外作業重要工具。
隨著半導體制作工藝的發展和芯片設計水平的進步,微處理器的性能大幅度地提高,ARM(Advanced RISCMachines)以其體積小、低功耗、低成本、高性能的特點逐漸在工業、無線通信、網絡消費電子等領域占據主流。
其中,在無線通信領域85%的無線通信設備采用了ARM 技術。另外,Android是Google于2007年11月5日宣布的基于Linux平臺的開源手機操作系統,它開放性好,功能擴展性強,并可集成Google應用。
車輛故障遠程監控是一個實時的過程,當有故障數據出現就通過GPRS發送到監控中心,同時監控中心給終端發送相應的執行命令,減少汽車拋錨時間。本文中使用了訊研通信息技術有限公司的MD231GPRS模塊和三星公司的S3C6410芯片。
1 系統總體設計
終端由ARM11?1 eZ芯片模塊通過串口線控制GPRS模塊的數據收發,連接到移動公司的GPRS網絡,再連接到遠程的計算機監控中心,從而實現遠程的數據傳輸功能。
系統總體設計包括硬件設計和軟件設計。硬件部分包括處理器的選型、Android內核移植等等,主要是為軟件部分搭建環境。軟件部分基于Java環境在Eclipse下編程,完成GPRS的數據傳輸功能。系統的總體設計流程如圖1所示。
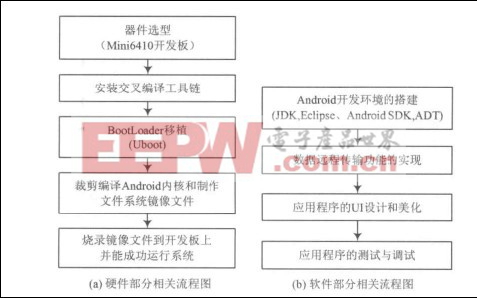
圖1 總體設計流程
2 系統硬件設計
2.1 系統硬件結構
本終端硬件由GPRS模塊和ARM11芯片處理模塊組成。由于Android系統對硬件的要求及經濟考慮,處理器選擇為ARM11,內核版本選擇為Android-Kernel-2.6.36,Android操作系統版本為Android-2.3.
ARM11芯片模塊主要由S3C6410A 處理器、256MDDR RAM 內存、1GB NAND FLASH 存儲器、串口、7寸LCD顯示器組成,NAND FLASH存儲器用于存放已調試好的應用程序和嵌入式Android操作系統,串口用于調試系統及與終端設備進行通信,7寸LCD液晶顯示屏用于顯示系統信息和相關的狀態。目前,GPRS技術比較成熟,GPRS模塊選擇實惠型MD321模塊。
GRPS模塊外圍有電源、天線和串口線,其中,串口線用于與ARM11處理器進行通信,能完成數據傳輸、短信收發、語音等系統框圖如圖2所示[1].
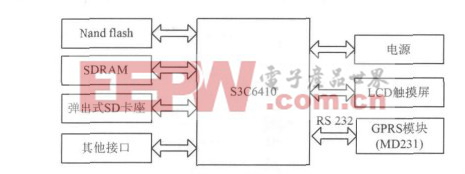
圖2 系統硬件結構框圖
2.2 Android操作系統移植
有了ARM11的硬件,就可以進行Android操作系統的移植。Android基于Linux內核,Google提供的內核源代碼中除了Linux部分外,有很大一部分是與虛擬處理器Qemu和模擬硬件平臺Goldfish相關。所以欲將Android移植到實際的硬件平臺上,需要編譯出一個適合目標平臺運行的系統內核。
在這里,電腦虛擬機上安裝的是Ubuntu系統,用于Uboot移植和Android 內核裁剪和編譯,并在Ubuntu 上安裝交叉編譯器arm-none-linuxgnueabi-gcc.
2.2.1 Uboot移植
下載U-boot源碼,在解壓文件夾里,刪除與該硬件版本無關的文件。在board目錄下建立Mini6410文件夾,把smdk6400目錄下的所有文件都拷貝到Mini6410目錄下,并建立自己的配置文件Mini6410.h,配置MakeFile文件;修改start.S文件、添加nand.c文件和修改Mini6410.h,使其支持從NAND FLASH 啟動;在Mini6410.h里,對網卡DM9000A、默認下載地址、環境變量等進行配置;修改網卡驅動。最后編譯Uboot生成Uboot.bin二進制文件[2].
2.2.2 Android內核的移植
下載Android內核源碼,進入解壓的Kernel.git文件夾。修改common-smdk.c文件中的NAND FLASH使其為4個分區,分別為BootLoader區,內核區,文件系統區,其他區;更改MakeFile文件中目標體系結構ARCH為ARM 和交叉編譯工具CROSS_COMPILE為arm-none-linux-gnueabi-;從Android SDK模擬器提取。config配置文件;配置內核,選中與S3C6410有關的選項;從其他Linux 內核中拷貝DM9000.h 和DM9000.c文件,并將兩個文件拷貝到內核代碼目錄中,修改相應的配置文件,配置內核支持DM9000A 網卡;編輯mach-smdk6410.c中LCD 驅動使其為7寸LCD,拷貝KConfig中相關內容和文件到新內核,并添加相應的代碼,修改devs.h文件,然后對內核進行配置選擇ADC和觸摸屏選項。最后編譯內核生成zImage文件[3].
2.2.3 Android文件系統的制作
下載Android源碼并編譯并生成out文件夾。其中root/就是root文件系統,將system/文件夾下的內容拷貝到root/system 下,這樣root/文件夾就是一個基本的文件系統。將Ubuntu系統/dev下文件夾內容拷貝到root/dev下面,并通過mknod命令創建需要的device[4].
2.3 硬件平臺測試
通過SD卡燒寫Uboot、內核和文件系統的鏡像文件到NAND FLASH,上電重啟開發板,系統能正常運行如圖3所示。運用XP系統上超級終端對串口進行通信測試,超級終端能收發信息,圖4為超級終端對Mini6410開發板根目錄的查詢,串口RS 232可用。
圖3 Android系統運行界面。
3 系統軟件設計
3.3 軟件測試
通過adb工具把com.apk從模擬器中取出來,再通過adb工具把生成好的com.apk放入終端上,或者140 現代電子技術2012年第35卷在Eclipse編譯時直接選擇硬件MINI6410_2011W08,com.apk就直接生成在終端上了。圖8為軟件通信時的界面,在中心軟件上輸入IP地址222.212.77.78,端口號上輸入6000,點擊連接,接收區將顯示“connect:
addr=222.212.78.77,port=6000,type=tcp OATRACE:oa_soc_connect_req:sock_id=1connectblock waiting!”實時顯示區顯示傳感器數據,這里以車霧燈為例,車霧燈狀態0(0表示正常,1為異常),在串口發送區可手動給監控中心發送數據,數據以ASCII字符ESC作為結束符。為了測試能否發送數據,以數據0為例,在發送區填寫30 1b點擊發送按鈕,在串口接收區有“SEND OK”字符串表示發送成功,有“SOCKET=0RECV=datalen>:rn30 1b>”字符串表示監控中心收到數據。

圖8 數據發送界面
4 結 語
系統經過集成測試,工作性能和可靠性良好,能夠在車聯網應用中和遠程監控中心實現有效通信,根據具體的情況給終端發送相應的命令數據,從而實現了車輛遠程的監控。
3.1 Android軟件開發環境的搭建
Android作為一個開放式的平臺,并將Java語言作為它的官方語言,這不僅是考慮到Java語言的強大功能,而且考慮Android平臺上絕大部分的程序都是基于Java的程序。Eclipse作為時下最流行的Java開發第15期唐奇明,等:基于Android的GPRS的車載通信終端的設計139工具之一,其良好的開放性、開發效率高、便于使用的特點非常符合OHA(Open Handset Alliance,開放手機聯盟)的主旨,非常適合作為Android的開發工具來使用。
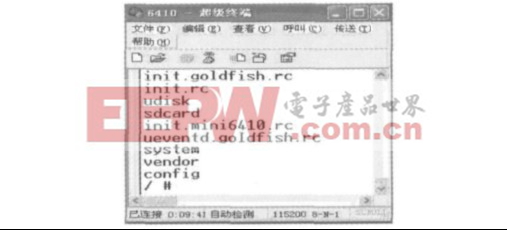
圖4 超級終端查詢Android系統根目錄界面
在官方網站下載基于XP系統下的JDK6,安裝完成后需要配置環境變量、系統變量和路徑;在官方網站下載并安裝XP 系統下的Android SDK,啟動SDKManager下載并安裝Android 2.3的相關Packages;在官方網站下載Eclipse、安裝Android DevelopmentTools插件和配置Eclipse(選擇SDK的安裝路徑);啟動SDK Manager,創建Android 2.3-API Level 9模擬器如圖5所示[5].

圖5 Android 2.3-API Level 9模擬器
3.2 GPRS通信應用軟件
應用軟件是在Eclipse環境下完成的。應用軟件主要實現對傳感器實時數據顯示,連接遠程監控中心,當出現異常數據時,通過GPRS傳輸到遠程監控中心,同時顯示遠程監控中心傳輸過來的命令。
3.2.1 通信應用程序處理器通過串口與GPRS進行通信
通信程序主要包括初始化、GPRS參數配置、建立連接、數據傳輸、斷開5個部分。GPRS通信應用程序流程圖如圖6所示。
(1)初始化。處理器通過AT命令初始化串口,包括波特率、數據位、停止位、奇偶校驗位等。
(2)GPRS參數配置。需要AT 命令配置GPRS一些參數才能進行通信。參數包括GPRS模塊通信網絡、登陸網絡的用戶名和密碼、遠端IP地址、端口號、通信協議類型、工作模式[6].
(3)建立連接。ARM 通過AT命令激活GPRS模式、控制GPRS進行網絡連接,在正常反饋下,一條終端到遠程監控中心的物理通道就建立起來了。
(4)數據傳輸。在與遠程監控中心連接成功后,就可以進行數據的收發操作。當接收數據時,終端從GPRS網絡上接收到數據幀,經協議處理模塊拆封之后,提取用戶數據,然后傳輸給RS 232接口;當發送數據時,設備從RS 232接口收到要發送的數據,經協議處理模塊封裝,然后發送到GPRS網絡上。
(5)斷開連接。當檢測到數據傳輸結束標志“+++”時,通過發送“AT#CONNECTIONSTOP”命令釋放數據鏈路。
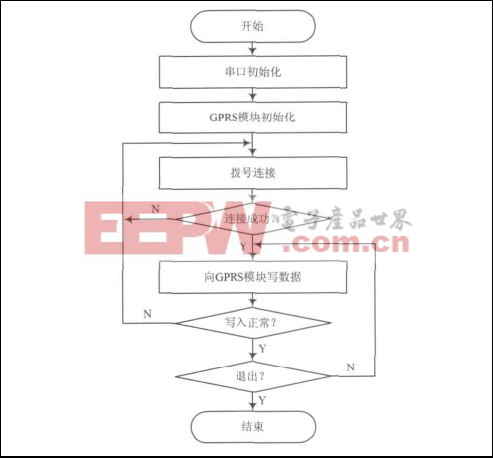
圖6 GPRS通信應用程序流程圖
3.2.2 應用程序界面設計
應用程序在Eclipse環境下完成的。在Eclipse上創建“Android Project”類型的工程,用widget(Text-View,Button,EditText等)構建UI,生成相關xml文件,并對UI進行事件處理(Button控件事件監聽),軟件界面如圖7所示[7].

圖7 軟件界面

數字通信相關文章:數字通信原理
通信相關文章:通信原理







評論