基于CAN總線的分布式機器人控制系統設計

0 引言
本文引用地址:http://www.j9360.com/article/152547.htm機器人控制系統是機器人信息處理和控制的主體,其設計好壞將決定機器人系統的整體行為和性能。機器人控制系統結構一般可分為三種類型:(1)集中控制方式,利用一臺微型計算機實現全部功能,這種方式具有結構簡單、經濟的特點,但處理能力有限,難以滿足高性能控制要求并且控制風險高度集中。(2)主從控制方式,用主從兩個CPU進行控制,主CPU擔當系統管理,機器人語言編譯和人機接口功能,同時也利用它的運算能力完成坐標變換、軌跡插補;從CPU完成全部關節位置數字控制,主從CPU間通過公用內存交換數據,對采用更多的CPU進一步分散功能比較困難。(3)分布式控制,普遍采用上、下位機二級分布式結構,上位機負責整個系統管理以及運動學計算、軌跡規劃等,下位機由多個CPU組成,每個CPU控制一個關節運動,這些CPU和上位機通過總線形式相聯系。這種結構的控制器工作速度和控制性能明顯提高,是一種比較理想的機器人控制方式[1]。傳統的機器人控制器采用MCU作為控制芯片,其運算速度和處理能力難以滿足日益復雜的機器人控制。在通訊方式上,常用的是RS422或RS485通訊,通訊的實時性較差,故障率較高,出現故障時,不容易排查[2]。本文所設計的機器人控制系統采用分布式控制方式,上位機采用高性能的工業PC機,下位關節控制器選用集成DSP的高速運算處理能力和MCU的控制特性于一體的Motorola DSP56F807作為控制芯片,上位機和下位各關節控制器之間采用了有效地支持分布式控制和實時控制的CAN(Controller Area Network)總線通訊方式,既能快速地實現機器人控制的復雜算法,又具有較高的控制實時性,是一個高性能的機器人控制系統。
1 控制系統結構
機器人是一個多自由度系統。機器人控制本質上是對各個關節的運動進行控制,使其協調運動,從而完成一些相對復雜的動作。該控制系統采用分布式控制方式,由上位主控計算機模塊、通訊模塊和下位關節控制器模塊組成,如圖1 所示。上位主控計算機負責整個系統的調度管理、在線運動規劃、故障診斷和人機交互等功能;通訊模塊負責上位計算機與下位各關節控制器之間的實時信息交換;各關節控制器和驅動直流無刷電機集成在一起,各個關節的運動由各關節控制器發出PWM信號驅動直流無刷電機實現。
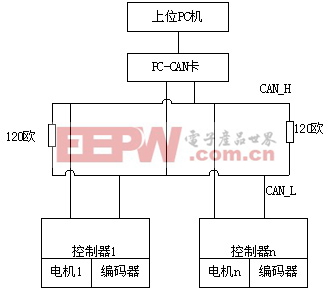
圖1控制系統簡圖
1.1 上位主控計算機模塊
上位計算機是控制系統的中樞,要求體積小,運算速度快,滿足機器人實時控制的要求,通常采用高性能工業控制計算機。上位機應用程序在可視化編程環境VC++6.0下編制,分為程序界面、通訊初始化部分和控制部分。控制部分是整個上位機軟件控制的核心,可實現單關節控制和多關節協調控制,圖2為單關節控制部分流程圖,單關節控制是從上位機輸入關節應該運動的期望位置值,然后向下位關節控制器發送單關節控制指令,并從下位關節控制器接受關節實際位置信息;下位關節控制器從上位機接收位置信息并加以運算處理,輸出PWM信號驅動直流無刷電機運動到期望位置。上位計算機的控制周期為20ms,它通過CAN總線接口卡連接到通訊總線上,與通訊總線上的各關節控制器交互信息。
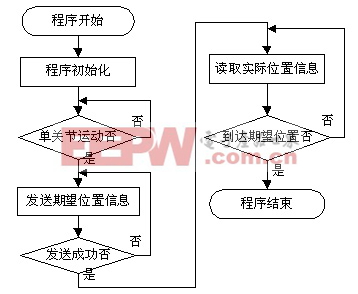
圖2上位機單關節控制程序流程圖
1.2 通訊模塊
機器人的分布式控制系統中,對通信方式的選擇至關重要,上位計算機和下位各關節控制器間的通信既要滿足硬件連接簡單,擴充方便,又要滿足通信的高可靠性和實時性。本設計采用CAN總線作為通信標準,CAN總線是一種有效支持分布式控制和實時控制的串行通訊網絡,與一般的通信網絡相比具有可靠性高、實時性和靈活性好的優點,非常適合作為機器人控制系統中的通訊方式[3]。
本控制系統中,上位計算機通過周立功單片機公司的USBCAN-II智能CAN接口卡連接到CAN網絡,在上位機中調用隨卡提供的ZLGVCI驅動庫函數,來實現CAN通信的管理和監控。CAN網絡各設備間通過雙絞線連接,因為雙絞線的特性阻抗為120歐,為了增強CAN通信的可靠性和抗干擾性,在CAN網絡的兩個端點加入120歐的抑制反射的終端匹配電阻。
1.3 下位關節控制器模塊
下位關節控制器模塊是整個控制系統的底層,與各關節驅動電機集成在一起,實際上是一個單關節運動控制和驅動模塊,主要用來控制各個關節運動具體執行過程。關節控制器接收主控計算機的控制命令,對各個關節的運動進行控制,同時把底層信息反饋給上位計算機,便于上位計算機協調規劃,統一管理。所有的下位關節控制器在硬件結構上完全相同,根據各關節運動控制的差異,內部灌注的軟件程序有所不同。關節控制器是整個控制系統的核心,也是本文研究的重點,它的性能好壞直接關系到機器人的整體性能。
2 控制器硬件系統設計
控制器硬件系統按結構和功能可分為主處理器單元、電源電路、電機驅動電路、CAN接口電路、欠壓保護電路、過流檢測電路等模塊,具體電路如圖3所示。

伺服電機相關文章:伺服電機工作原理
pid控制器相關文章:pid控制器原理
雙絞線傳輸器相關文章:雙絞線傳輸器原理









評論