基于CAN總線的分布式嵌入式遠程監控系統研制

表2 遠程幀舉例
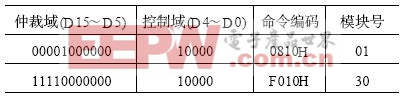
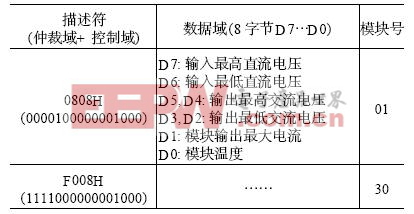
當CAN控制器發出設置逆變模塊開關和模塊參數的數據幀時,定義中除了標識符的設置外,遠程發送請求位被置為“0”,DLC置“1000”表示一幀數據信息中的數據域有8個節字的數據要發送。CAN控制器發送設置(修改)逆變模塊參數的數據幀時,數據結構如表3所示。
表3 模塊參數格式
在CAN控制器發送設置逆變模塊開關機的數據幀時,開關機信息由一位數據表示,緊跟命令編碼。當數據值為0FH時,表示逆變模塊關機;當數據值為01H時,表示逆變模塊開機。除了發送數據信息外,系統還要接收來自各個逆變模塊的告警信息幀和模塊參數數據幀信息,接收數據幀的格式仍然參考上例制定。主站程序流程圖如圖2所示。
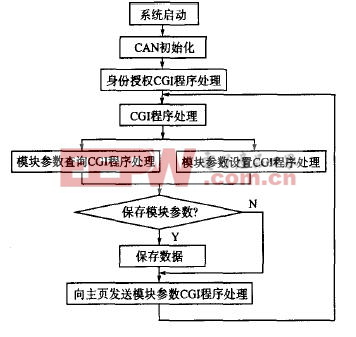
圖2 主站程序流程圖
網絡服務器配置及主頁設計
通過在嵌入式uCremm上的uClinux操作系統上移植HTTP服務器軟件BOA,并設置其配置文件(boa. conf),可以指定主頁和CGI程序所在路徑。這里CGI程序用C語言編寫,其實就是一些應用程序,如CAN通訊數據等,只是它能由遠程瀏覽器通過點擊主頁而激活,從而實現瀏覽器和服務器的交互功能。如圖3所示,用戶在遠程瀏覽器中輸入嵌入式Webserver的IP地址后,需要登錄用戶名及密碼,當得到服務器確認后,進入監控界面。圖4為監控系統登陸界面,圖5為系統主參數界面。
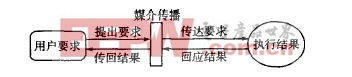
圖3 瀏覽器和服務器的交互功能示意圖
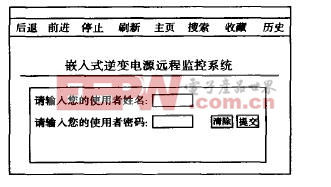
圖4 監控系統登陸界面
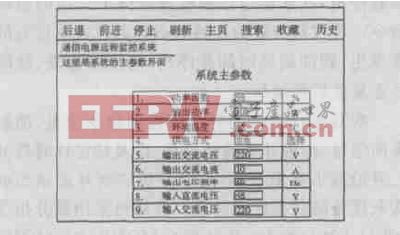
圖5 系統主參數界面
利用網頁來顯示監控界面, 使監控系統由傳統的C?S 模式(Clien t?Server) 轉變為更先進的B?S 模式(B row ser?Server) , 不僅節省了購買和開發監控上位機軟件的費用, 而且使之成為不受地域限制上的真正意義的遠程監控系統。
總結
嵌入式系統具有可裁減、體積小和進程及內存管理、網絡支持等功能的獨特設計和極高的可靠性; 而CAN 總線具有多主站運行和分散仲裁以及廣播通信的特點和可不分主次任意節點可在任意時刻主動向網絡上其它節點發送信息,實現自由通信卓越特性和功能。因此將CAN 總線與嵌入式系統的技術融合,將是后PC 時代的發展趨勢。本系統針對通信用多逆變模塊電源系統的遠程監控要求而開發研制,其技術完全可以移植到樓宇自動化、工業底層設備網絡等其它遠程監控場合。 linux操作系統文章專題:linux操作系統詳解(linux不再難懂)







評論