CAN總線在嵌入式Linux下驅動程序的實現

1 引言
本文引用地址:http://www.j9360.com/article/152300.htm基于嵌入式系統設計的工業控制裝置,在工業控制現場受到各種干擾,如電磁、粉塵、天氣等對系統的正常運行造成很大的影響。在工業控制現場各個設備之間要經常交換、傳輸數據,需要一種抗干擾性強、穩定、傳輸速率快的現場總線進行通信。文章采用CAN總線,基于嵌入式系統32位的S3C44B0X微處理器,通過其SPI接口,MCP2510 CAN控制器擴展CAN總線;將嵌入式操作系統嵌入到S3C44B0X微處理器中,能實現多任務、友好圖形用戶界面;針對S3C44B0X微處理器沒有內存管理單元MMU,采用uClinux嵌入式操作系統。這樣在嵌入式系統中擴展CAN設備關鍵技術就是CAN設備在嵌入式操作系統下驅動程序的實現。文章重點解決了CAN總線在嵌入式操作系統下驅動程序實現的問題。對于用戶來說,CAN設備在嵌入式操作系統驅動的實現為用戶屏蔽了硬件的細節,用戶不用關心硬件就可以編出自己的用戶程序。實驗結果表明驅動程序的正確性,能提高整個系統的抗干擾能力,穩定性好,最大傳輸速率達到1Mb/s;硬件的錯誤檢定特性也增強了CAN的抗電磁干擾能力。
2 系統硬件設計
系統采用S3C44B0X微處理器,需要擴展CAN控制器。常用的CAN控制器有SJA1000和MCP2510,這兩種芯片都支持CAN2.0B標準。SJA1000采用的總線是地址線和數據線復用的方式,但是嵌入式處理器外部總線大多是地址線和數據線分開的結構,這樣每次對SJA1000操作時需要先后寫入地址和數據2次數據,而且SJA1000使用5V邏輯電平。所以應用MCP2510控制器進行擴展,收發器采用82C250。MCP2510控制器特點:1.支持標準格式和擴展格式的CAN數據幀結構(CAN2.0B);2.0~8字節的有效數據長度,支持遠程幀;3.最大1Mb/s的可編程波特率;4.2個支持過濾器的接受緩沖區,3個發送緩沖區;5.SPI高速串行總線,最大5MHz;6.3~5.5V寬電壓范圍供電。MCP2510工作電壓為3.3V,能夠直接與S3C44B0X微處理器I/O口相連。為了進一步提高系統抗干擾性,可在CAN控制器和收發器之間加一個光隔6N137。其結構原理框圖如圖1:
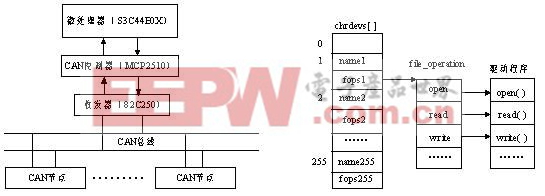
圖1.S3C44B0X擴展CAN結構框圖 圖2.字符設備注冊表
3 CAN設備驅動程序的設計
Linux把設備看成特殊的文件進行管理,添加一種設備,首先要注冊該設備,增加它的驅動。設備驅動程序是操作系統內核與設備硬件之間的接口,并為應用程序屏蔽了硬件細節。在linux中用戶進程不能直接對物理設備進行操作,必須通過系統調用向內核提出請求,由內核調用相應的設備驅動。因此首先建立Linux設備管理、設備驅動、設備注冊、Linux中斷這幾個概念。
3.1 Linux的設備管理
Linux支持各種各樣的外圍設備,對這些設備的管理通稱為設備管理。設備管理分為兩部分:一部分是驅動程序的上層,與設備無關的,這部分根據輸入輸出請求,通過特定的設備驅動程序接口與設備進行通信;另一部分是下層,與設備有關的,通常稱為設備驅動程序,它直接與硬件打交道,并且向上層提供一組訪問接口。Linux設備管理為了對設備進行讀、寫等操作,把物理設備邏輯化,把它看成特殊的文件,稱為設備文件,采用文件系統接口和系統調用來管理和控制設備。Linux把設備分為三類,塊設備、字符設備和網絡設備。每類設備都有不同管理控制方式和不同的驅動程序,這樣方便于對系統進行裁減。Linux內核對設備的識別是根據設備類型和設備號。在字符設備中使用同一個驅動程序的每種設備都有唯一的主設備號。CAN設備通過在/vendor/Samsung/44b0/Makefile文件下設置設備類型和設備號分別為can、125。
Linux對設備操作的具體實現是由設備驅動程序完成。設備驅動程序加載到系統中通過設備注冊實現。Linux驅動程序對文件的操作通過file_operations結構體來完成。file_operations結構體是文件操作函數指針的集合。在設備管理中該結構體各個成員項指向的操作函數就是設備驅動程序的各個操作例程,編寫驅動程序實質上就是編寫該結構體中的各個函數。對不同的設備可以配備其中全部或部分的操作函數,不使用的函數指針置為NULL。下面是CAN設備file_operations結構體:
Static struct file_operations {
write: s3c44b0_mcp2510_write,//寫操作
read: s3c44b0_mcp2510_read,//讀操作
ioctl: s3c44b0_mcp2510_ioctl,//讀寫之外的操作
open: s3c44b0_mcp2510_open,//打開設備
release: s3c44b0_mcp2510_release};//關閉設備
這個結構的每一個成員的名字都對應著一個系統調用。用戶進程利用系統調用,來調用自己的驅動接口,系統調用通過設備文件的主設備號找到相應的設備驅動程序,然后讀取這個數據結構相應的函數指針,接著把控制權交給該函數。
3.3 設備注冊
在linux中,當一種設備安裝到系統時必須向系統進行注冊,設備注冊的主要任務是把設備驅動程序加載到系統中。Linux對不同的設備(如字符設備和塊設備)分開進行注冊管理。每個設備描述符包括兩個指針:name指向設備名字符串,fops指向文件操作函數結構file_operations,該結構體中包含著指向驅動程序各個操作例程的指針。圖2給出了linux字符設備注冊表的示意圖。CAN字符設備的注冊函數是內核函數:register_chrdev(MAJOR_NR,DEVICE_NAME,s3c44b0_mcp2510_fops);
其中參數DEVICE_NAME表示設備名,s3c44b0_mcp2510_fops表示指向file_operations結構體的指針,即指向設備的驅動程序。
3.4 Linux中斷的處理
在linux系統里,對中斷的處理是屬于系統核心部分,因而如果設備與系統之間以中斷方式進行數據交換,就必須把該設備的驅動程序作為系統核心的一部分。設備驅動程序通過用request_irq函數來申請中斷,通過free_irq來釋放中斷。由于本實驗未用到中斷,因此在此不作詳細介紹。
3.5 CAN驅動程序的實現
3.5.1編寫驅動程序操作例程
CAN設備屬于字符設備,對于CAN總線設備,除了發送(使用write方法)、接受(使用read方法)以外,還需要控制CAN總線通信的波特率、設置工作模式、設置ID等,所以使用ioctl是最合適的方法。
CAN驅動程序的入口函數:
int __init s3c44b0_mcp2510_init(void){ARMTargetInit();//初始化ARM
init_MCP2510(BandRat125kbps);//初始化CAN控制器 ret=register_chrdev(MAJOR_NR,DEVICE_NAME,s3c44b0_mcp2510_fops);}//注冊CAN設備
CAN驅動程序的退出函數:void __exit s3c44b0_mcp2510_exit(void){
unregister_chrdev(MAJOR_NR,DEVICE_NAME);printk(MCP2510 Eixt!n);}
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)





評論