EMC2的硬件抽象層原理與實現

4 HAL架構
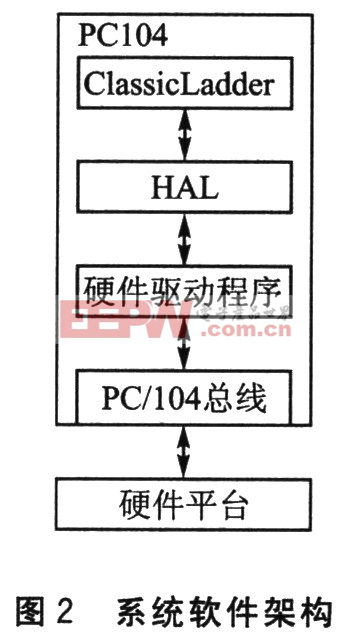
系統軟件架構如圖2所示。用HAL將各I/O通道、ADC通道、DAC通道、脈沖通道、編碼器通道抽象成Pin,將對硬件各模塊的操作抽象成各個Function,將Pin和Function封裝在命名為hal_CNC的Component中。本文引用地址:http://www.j9360.com/article/152181.htm
硬件在Component中被映射為如下數據結構:
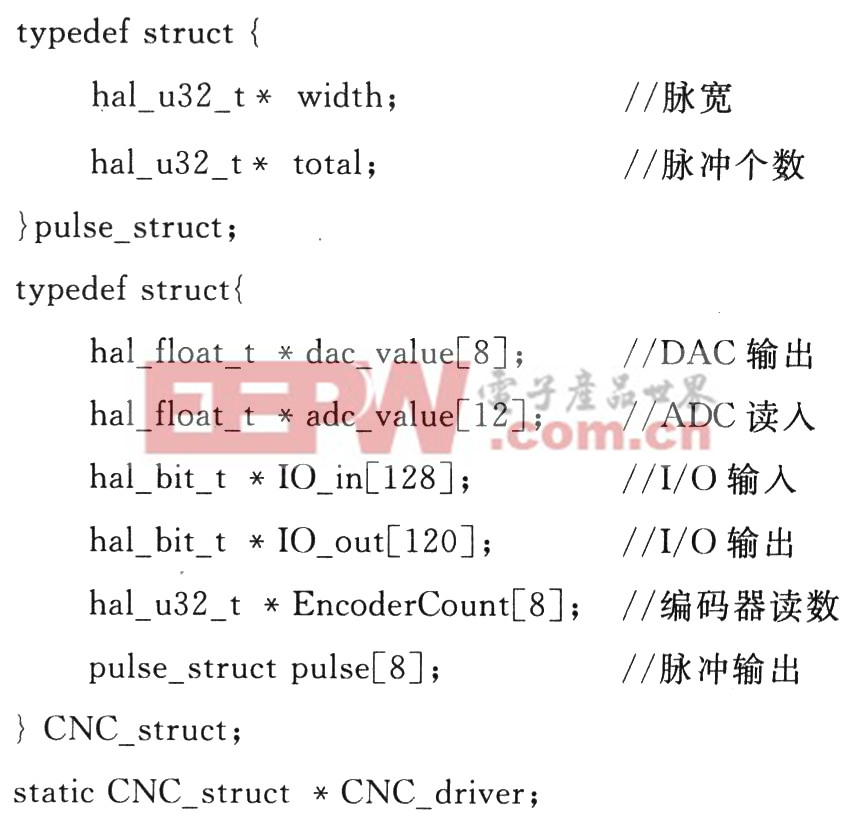
由上述結構可以看出,每個Pin對應一個相應類型的指針,該指針指向的內存區便存放該引腳的值。
5 基于HAL的驅動程序編寫
hal_CNC由源文件hal_CNC.c和hal_CNC.h構成。hal_CNC.c定義了對hal_CNC的初始化、底層硬件驅動函數、hal_CNC退出時的操作等。rtapi_app_main()函數是載入Component時的程序入口。
首先申請當前Component的ID號,對Component的每個操作都由該ID號索引。
comp_id=hal_init(“hal_CNC”);
//hal_CNC為Component的名字
其次,分配組件運行時所需內存,代表Pin的指針指向的內存區域便是在此分配:
CNC_driver=hal_malloc(sizeof(CNC_struct));
接著將所定義Pin導出到HAL。該操作通過調用自定義的export()函數來完成。以DAC模塊為例,操作如下:
for(n=0;n8;n++)
export_dac(n,CNC_driver); //導出Pin
每次調用export_dac()時,都會調用如下語句注冊一個Pin。
rtapi_snprintf(buf,HAL_NAME_LEN,“CNC.DAC.%d.value”,num);
hal_pin_float_new(buf,HAL_IN,(addr->dac_value[num]),comp_id);
其中“CNC.DAC.XXX.value”是Pin的名稱。軟PLC通過該名稱對此Pin進行引用。hal_pin_float_new()是HAL提供的函數,在新建Type為FLOAT型的Pin時使用。該函數一共有4個參數,依次是Pin名、Pin方向、Pin內存指針地址、Component ID。引腳方向HAL_IN表示該值是從軟件層“輸入”到HAL中的,該方向針對軟件層與HAL層而言。
對Pin進行操作的Function也要導出到HAL:
hal_export_[unct(“CNC.DAC.write”,CNC_dac_write,CNC_driver,1,0,comp_id);其中“CNC.DAC.write”為軟件層使用該Function時引用的名字;CNC_dac_write為函數在C源文件中實際對應的C函數名稱;CNC_driver為Component的內存指針;1表示函數用到了浮點數;0表示該函數不可重入;comp_id為Component ID。






評論