磁懸浮列車運行控制系統仿真

磁懸浮列車運行控制系統(OCS)是一個安全性要求很高的系統,其安全可靠性直接關系到磁浮列車的安全穩定運行。為了使磁懸浮列車運行控制系統達到相關的安全性標準,對其進行安全性測試是十分必要的。要進行安全性測試,就必須要有一個仿真環境對運行控制系統的實際運行條件進行模擬。仿真環境要求盡可能地反映真實情況,按照真實環境可能出現的各種故障進行模擬。
本文引用地址:http://www.j9360.com/article/150430.htm1 OCS外部環境分析
1.1 OCS外部環境功能描述
OCS由中央控制子系統、分區控制子系統和車載控制子系統三層結構組成。運行控制系統的外部環境包括道岔測控系統、分區牽引控制系統、分區牽引供電系統和列車懸浮導向及定位系統。OCS及外部環境結構如圖1所示。
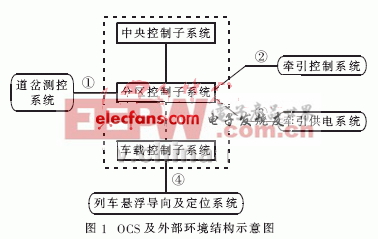
道岔測控系統主要用于控制道岔的位置,通過接收分區控制子系統的控制命令來移動并鎖閉道岔,并把采集到的道岔位置信息傳送給分區控制子系統;牽引控制系統按照分區控制子系統發出的控制命令和設定值完全自動運行,主要用于列車牽引的開、閉環控制和狀態的監控;牽引供電系統為磁懸浮列車的運行提供動力,它通過大功率變流系統對輸出的電壓和電流進行調節,從而實現對磁懸浮列車牽引力的有效控制;列車懸浮導向及定位系統主要實現列車的懸浮、定位以及車輛橫向穩定控制并跟蹤導軌。
1.2 OCS外部接口分析
由圖1可以看出,運行控制系統與道岔測控系統、牽引控制系統、牽引供電系統、列車懸浮導向及定位系統都有接口上的連接。
OCS與道岔測控系統的接口(如圖1中①所示)包括串行接口和數字接口。在上海磁浮示范線中,串行接口用于傳送道岔控制命令及位置信息;數字接口用于啟動、關閉道岔測控系統的供電。
OCS與牽引控制系統的接口(如圖1中②所示)為以太網接口。在上海磁浮示范線中,通過此接口向牽引供電控制系統傳送列車運行的速度曲線數據和參數,從而實現對列車運行的控制。
OCS與牽引供電系統的接口(如圖1中③所示)為數字接口。在上海磁浮示范線中,此數字接口用于對牽引供電系統的切斷和切斷命令執行后電流的回讀。
OCS與列車懸浮導向及定位系統的接口(如圖1中④所示)包括串行接口和數字接口。在上海磁浮示范線中,通過此串行接口傳送列車定位信息及運行顯示信息;數字接口用于對列車的浮起/放下、開啟渦流制動、開關車門等。
2 OCS仿真環境的設計與實現
2.1 OCS仿真環境的建立
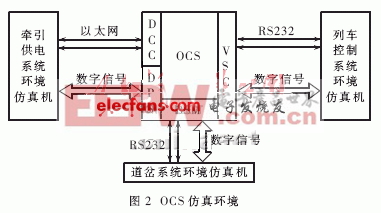
通過對OCS外部環境及外部接口的分析可知,環境仿真機可以分別實現對牽引供電系統、道岔系統、列車控制系統的模擬,外部接口也不外乎以太網、串行口和數字接口三種情況。另外,從磁浮列車運行的安全性方面考慮,以太網和串行通路采用雙路冗余方式,數字信號采用動態輸入輸出方式。由此,可以建立如圖2所示的OCS的仿真環境,分區控制計算機(DCC)與牽引供電系統環境仿真機之間有二條冗余以太網通路,分區牽引切斷(DPS)與牽引供電系統環境仿真機之間有數字信號輸入輸出通路;分區道岔模塊(DSM)與道岔系統環境仿真機之間有兩條冗余RS232串行通路和數字信號輸入輸出通路;車載安全計算機(VSC)與列車控制系統環境仿真機之間有二條冗余RS232串行通路和數字信號輸入輸出通路。
OCS與牽引供電系統環境仿真機之間的以太網通路用于DCC與牽引供電系統環境仿真機之間交換相關的牽引數據,包括運行數據和狀態數據;數字信號通路是DPS發送一個電子切斷信號給牽引供電系統環境仿真機,或讀取牽引供電系統環境仿真機執行切斷命令后的狀態信息。
OCS與道岔系統環境仿真機之間的RS232通路用于DSM向道岔系統環境仿真機發送道岔動作控制命令;數字信號通路用于道岔系統環境仿真機向DSM發送道岔的位置及狀態信息。
OCS與列車控制系統環境仿真機之間的RS232通路用于VSC向駕駛員控制臺提供其所需的運行顯示信息,并且駕駛員控制臺可以將駕駛員在控制臺上發出的操作命令傳送回去。列車定位系統通過RS232通路傳遞定位數據給VSC;數字信號通路用于VSC給列車控制設備發送控制命令,包括列車的浮起/放下、開啟渦流制動、開關車門等,這些動作的結果又通過數字信號通路發回給VSC.
2.2 OCS仿真環境的實現
2.2.1 OCS仿真環境的硬件實現
OCS環境仿真的硬件結構包括牽引供電系統環境仿真機、道岔系統環境仿真機和列車控制系統環境仿真機。這些環境仿真機可采用普通的PC機來實現。一般的PC機都有二個RS232串口,滿足二條冗余RS232串行通信的需要,不必另外擴展串口。雙路冗余的以太網可以通過增加以太網卡的方式實現。數字信號的輸入輸出可以通過DB25的并行口進行通信,位數完全滿足數字信號量通信的需要。
2.2.2 OCS仿真環境的軟件實現
OCS環境仿真中的軟件主要包括牽引供電系統環境仿真機中的軟件、道岔系統環境仿真機中的軟件和列車控制系統環境仿真機中的軟件。
(1)牽引供電系統環境仿真機中的軟件結構
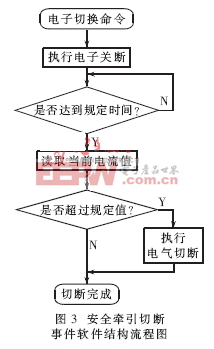
根據故障-安全的原則,當車地之間的通信中斷,列車的速度超過最大允許速度或低于最小允許速度時,必須對牽引供電系統進行安全牽引切斷。分區牽引切斷的動作通過電子切斷和電氣切斷來實現。DPS向牽引供電系統環境仿真機發送一個電子切斷信號,環境仿真機執行切斷命令并回讀電流值給DPS.如果回讀的電流值超過了限定值,則引發電氣切斷。安全牽引切斷事件的軟件結構流程如圖3所示。








評論