一種μC/OS-II任務調度硬件指令的實現

μC/OS-II 是一種基于優先級的搶占式多任務實時操作系統,包含了實時內核、任務管理、時間管理、任務間通信同步(信號量,郵箱,消息 隊列)和內存管理等功能。它可以使各個任務獨立工作,互不干涉,很容易實現準時而且無誤執行,使實時應用程序的設計和擴展變得容易,使應用程序的設計過程大為減化。
本文引用地址:http://www.j9360.com/article/149737.htm1 μC/OS-II的任務調度算法分析
1.1 μC/OS-II任務就緒表的解讀
μC/OS操作系統采用優先級至上的任務調度原則,讓進入就緒態任務中優先級最高的那個任務,一進入就緒態就能立即運行。μC/OS操作系統實現了一種巧妙的查表算法,利用這種算法能快速實現任務調度原則。如何從任務就緒表中,查找優先級最高的那個任務?歸結起來:
兩個變量(OSrdyGrp、OSRdyTb1[])和兩張表(OSMapTb1[]、OSUnMaTb1[])。
μC/OS操作系統可支持64個任務,每個任務被賦予不同的優先級——從0級到最低優先級OS_LOWEST_PRIO,最末兩個為操作系統所用,分別為統計任務和空閑任務的優先級。μC/OS-II任務就緒表如圖1所示。判斷任務就緒同樣根據OSRdyTb1[]和OSRdyGrp兩個變量來完成:OSR-dyTb1[]按任務優先級分成8組(即每一組8個任務優先級),當任務處于就緒狀態時,對應的位為1,反之則為0;OSRdyTb1口組中任何一位為1時,對應的OSRdyGrp位置1。
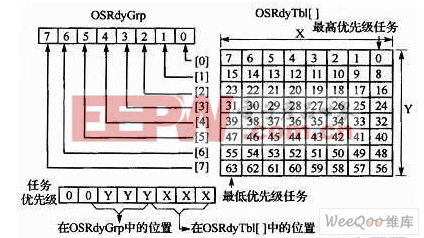
圖1 μC/OS-II任務就緒表
使任務進入就緒狀態和脫離就緒狀態,都是通過OSRdyTb1[]和OSRdyGrp這兩個變量來查找OSMapTb1[]表完成的:
①進入就緒狀態。

任務優先級的低3位用于確定任務在總就緒表OSRdyTb1[]中的位置。緊接著前面的3位用于確定是OSRclyTb1[]數組的第幾個元素,兩個變量都置1。
②脫離就緒狀態。

代碼將就緒任務表數組OSRdyTb1[]中相應元素的相應位清0,而只有當這一組中的所有任務都為脫離就緒態時,OSRdyGrp變量才會為0。
1.2 高優先級任務的查找
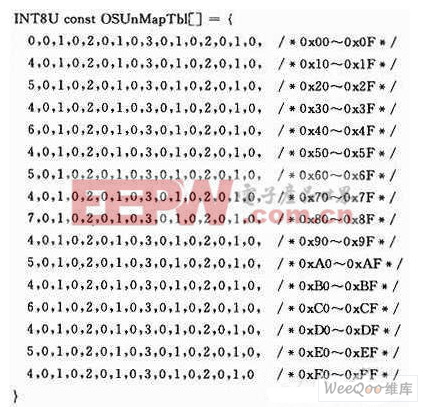
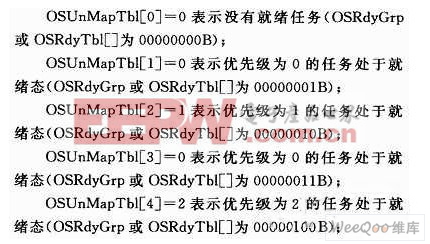
從任務就緒表中查找最高優先級任務,即從OSRdyTb1[]變量中找到最低為1的位是第幾位(對應的就是最高優先級任務)。μC/OS-II采用查表的方式來找出處于就緒態的最高優先級任務,μC/OS-II中有一張256個單元的數據表OSUnMapTb1[],表中按一定規律有128個O,64個1,32個2,16個3,8個4,4個5,2個6,1個7,還有1個0,共256字節。OSUnMapTb1[]的定義如下所示:
找出進入就緒態的最高優先級任務的代碼如下:

初看這張表感覺雜亂無章,實際是很有規律的。以“OSUnMapTb1[0]~OSUnMapTb1[15]:0,0,1,0,2,0,1,0,3,0,1,0,2,0,1,0,/*0x00~0x0F*/”為例說明:
其他依次類推。
下面再以一個實例進行說明:假設變量OSRdyGrp=01011000B,表示變量OSRdyTb1[3]、OSRdyTb1[4]、OSRdyTb1[6]有任務處于就緒狀態,任務調度是去查找最高優先級任務(y=OSUnMapTb1[0x58])。由于OSRdyTb1[3]>OSRdyTb1[4]>OSRdyTb1[6],結果y=3。如果OSRdyTb1[3]=1000 0001B,則通過查表x=OS-UnMapTb1[OSRdyTb1[3]],即可得到x=O,表明這組數中第0位為1處于最優狀態。這樣,prio=(y《3)+x=(3《3)+0=24。再利用這個優先級的值,查找任務控制塊優先級表OSTCBPrioTb1[],得到指向任務的任務控制塊OS_TCB。
2 Cortex-M3中μC/OS-II任務調度的硬件實現
Cortex-M3采用精簡指令集,采用Thumb-2指令,其中包括基于RTOS的硬件算法指令(CLZ),可以通過這種指令查找處于就緒態的最高優先級任務。μC/OS-II中任務的就緒態是反映在OSRdyTb1[]變量中,共計8字節(64位),對應64個任務。可以將其折分成兩個32位的數據,然后分別查找這兩個32位的數據中優先級最高的任務。先查找低32位,如果低32位中不為零,則找出其中最高優先級任務;否則查找高32位,找出其中最高優先級任務,高32位的的查找結果應加上數值32。
Cotrex-M3中通過以下兩條指令就可完成最高優先級任務的定位:RBIT和CLZ。RBIT的含義是把一個32位數據水平旋轉180°;CLZ的含義是計算前導零的個數。
假設在OSRdyTb1[]的低32位數據中,00000000000000000000000000001100B表示優先級為2的任務和優先級為3的任務處于就緒態,現在要通過指令RBIT和CLZ找出優先級為2的任務并調度運行。運行RBIT后數據變為:00110000000000000000000000000000000000。運行CLZ后計算出前導零的個數為2,表明優先級為2的任務處于最高就緒態。
μC/OS-II中的任務調度是通過查兩次表完成最高優先級任務的查找,方法如下:
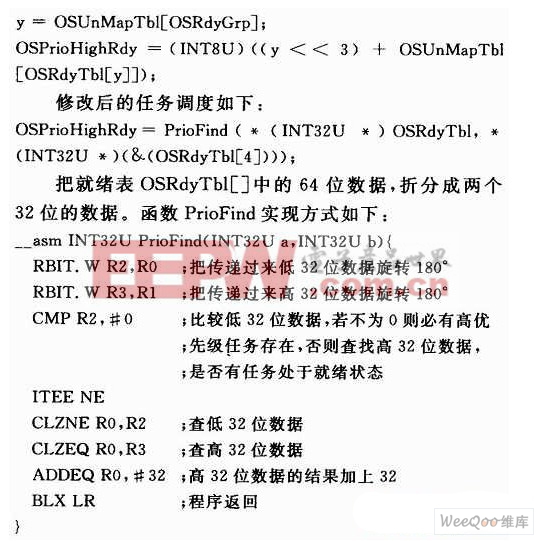
上述代碼在MDK4.12軟件中測試,系統時鐘采用8 MHz,按照此方法進行任務調度可節省0.5μs,同時還減少了用來存放OSUnMapTb1[]的256字節的空間,縮短了代碼運行時間,提高了CPU的利用率。此方法在μC/OS-II的任務通信中也同樣適用。在此不再贅述。
結語
本文主要對μC/OS-II中的任務調度算法作了分析,特別闡述了OSUnMapTb1[]表是如何構成的,同時介紹了基于ARM Cortex-M3處理器平臺的μC/OS-II的任務調度硬件實現方法,簡化了μC/OS-II的代碼,提高了處理器的性能。




評論