監控軟件設備驅動程序編制原理與實現

摘要:以MCGS監控軟件為例,詳細介紹了監控軟件與PLC、采集板卡、智能儀表等進行數據通信的設備驅動程序的編制原理與實現。
本文引用地址:http://www.j9360.com/article/149057.htm0前言
在專業監控軟件出現以前,自動控制系統集成人員的一個重要任務就是編寫專門的系統上位監控程序。但是,在實際工程中我們發現:一方面,由于各編程人員的水平參差不齊,許多軟件的功能和可靠性都存在問題;另一方面,由于每個編程人員的編程習慣和編程思路都不同,程序的可讀性和功能的擴展性都比較差。因此,功能強大、實用面廣的專業監控軟件就應運而生。如MCGS監控軟件、組態王控軟件等。由于現場智能儀表、采集板的多種多樣,監控軟件自帶的設備驅動程序畢竟有限,因此編制設備驅動程序就成了自控系統集成工程師的重要工作之一。
本文以北京昆侖通態公司開發的MCGS為例來說明監控軟件設備驅動程序的一般思路。MCGS是基于Windows95和WindowsNT平臺,為用戶提供了從數據采集到數據處理、報警處理、流程控制、動畫顯示、報表輸出等解決實際工程問題的完整方案和操作工具。MCGS允許用戶在VisualBasic中操作MCGS中的對象,提供了一套開放的可擴充接口,用戶可根據自己的需要用VB編制特定的功能構件來擴充系統的功能。
1接口原理
許多組態軟件提供了設備驅動程序軟件開發包,支持用戶用VB、VC、Delphi等高級編程語言編制設備驅動程序。MCGS組態軟件驅動程序編程原理框圖如圖1所示:
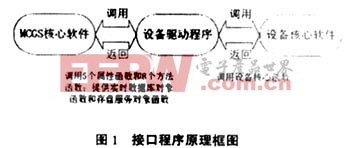
幾乎所有的PLC、智能儀表、采集板卡都提供了驅動軟件,有的在說明書中還提供了驅動軟件的核心代碼、函數或數據結構。而監控軟件也提供了開放性的可擴充接口,一般包括屬性函數、方法函數、IO端口操作函數和串口操作函數等。在運行模式下,監控軟件定時或在事件激發時調用設備驅動程序,而設備驅動程序根據需要,再調用設備核心函數。
例如,MCGS在組態模式下按“在線幫助”按鈕就會調用GetDevHelp接口,顯示設備構件的在線幫助;按“內部屬性”按鈕時就會調用SetDevPage接口,顯示設備構件的特定屬性頁。在運行環境下,MCGS首先調用一次InitDevRun接口對設備進行一些必須的初始化工作。然后MCGS按設定的采集周期調用CollectDevDat接口,從設備采集數據或向設備輸出數據。運行時,當用戶在腳本程序中調用!SetDevice函數或在運行策略中調用設備操作功能時,MCGS調用RunDevCommand接口,以執行設備的特定功能。

2編程實現
常用設備驅動程序包括采獨立板卡類驅動程序和智能儀表類驅動程序。
2.1獨立板卡類
獨立板卡類包括模數(A/D)轉換板、數模(D/A)轉換板、開關量輸入輸出板(DI/DO),通信板卡等。它們一般直接插入計算機的總線槽里,通過ISA或PCI總線擴展槽與計算機進行數據通信。每塊板都有一個基地址范圍為:000H-3FFH,計算機通過該基地址來向采集板輸入輸出數據,沒有通信協議的概念。
在MCGS組態軟件運行時,MCGS會定時調用接口函數:PublicFunctionCollectDevDat(DatFAsVariant,DatAsVariantmsgAsVariant)AsLong。所以需要定時采集的數據都通過這個接口來采集,采回來的數據都放在數組dat中。
對于那些不需要定時采集的數據,如設備的量程上下限,或其他一些參數,只有用戶改變了后,才需要重新讀回來,還有一些往設備輸出的參數,也是不定時的,MCGS為這些特殊的情況定義了一個接口函數:PublicFunctionRunDevCommand(DatObjAsObject,ByValCmdAsString)AsLong。在MCGS的腳本程序里執行函數!SetDevice(“子設備名”,6,“帶有參數的命令名”),MCGS就會調用RunDevCommand函數,并把“帶參數的命令”傳給了字符串變量“cmd”。如以天辰PID控制儀為例,用戶想改變儀表的設定值(SV值),我們就可以定義一條這樣的命令,SetValue(dat1,dat2),這時MCGS就把命令傳到了cmd中,cmd=“SetValue(Dat1,Dat2)”。使用字符串函數把命令中的兩個參數取出來,兩個參數的意思是,dat1表是設定在儀表中存放的地址,dat2為要設定的值,獲得了這兩個參數的值后,就可以根據協議的規定發送一條設定(SV值)的命令來改變SV值。其他的參數設定也是類似的。至此設備的驅動程序就基本完成
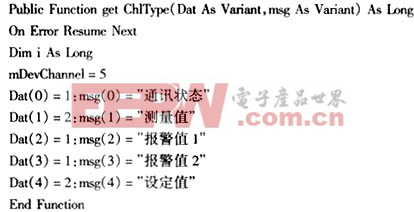
還有一個接口函數:PublicFunctionGetChlType(DatAsVariant,msgAsVariant)AsLong。其作用就是讀取設備通道數據的類型和設備通道類型說明。例如:
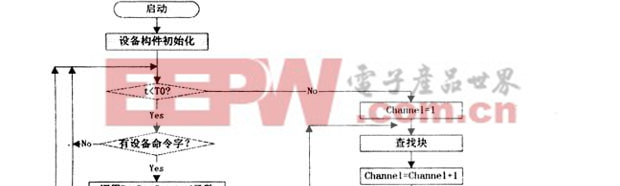
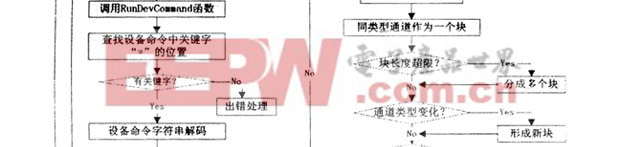
所以每一個設備驅動程序要做的主要工作是編寫以上三個接口函數。接口軟件編程流程圖如圖2所示。
2.2智能儀表類
智能儀表類包括各種智能儀表和智能模塊。它們必須通過與計算機的串口(通常叫com口)連接才能與計算機進行數據通信。串口通信原理圖如圖3所示:
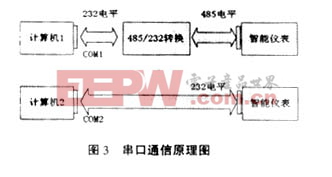
設備通過計算機的串口,采用各種通信協議與計算機進行通信。必要的通信參數有波特率大小,數據位長度,停止位位數,有無奇偶校驗等。對于與串口通信有關的設備,必須調用一個串口父設備,子設備只負責按通信協議形成設備命令,并把命令放到一個固定的字節數組中,然后子設備調用父設備的幾個通信函數,包括


pid控制相關文章:pid控制原理









評論