利用雙節點位置檢測技術提高LIN總線性能

本地互連網絡(LIN)作為低成本車載網絡的首選方案已得到認可,尤其是用在包括空調、汽車門鎖以及車鏡控制裝置在內的汽車車身及舒適系統中。總線通信結構簡單,數據傳輸速率相對較低,這就意味著LIN功能可適用于大多數汽車模塊,而且幾乎不會對空間和成本造成任何影響。
本文引用地址:http://www.j9360.com/article/148794.htm基本的LIN網絡由一個主節點和數個從節點組成,通過能夠產生有線“與”功能的單條通信線互聯。通信速率高達19.2Kbps,采用兩種被稱為“隱性”和“顯性”的電氣狀態傳輸信號,這兩種狀態分別代表邏輯1和0。當總線上所有發送器均處于被動狀態時,由于主節點中1k(上拉電阻的作用,總線電壓始終保持在接近電池供電電壓。當發送器主動將總線電壓拉向地電位時,就會出現“顯性”狀態。
不過,即便是這樣一個簡單的設置,卻給設計人員提出了各種挑戰,特別是在節點尋址和故障檢測方面。在正常模式的通信開始前,每個節點在啟動或重置時都被分配了一個唯一的地址。這主要通過以下兩種方式之一來實現:通過從節點的硬連線、對OTP位進行編程、專用連接器或DIP開關設置來實現;或者通過被稱為從節點位置檢測(SNPD)的自動尋址方式來實現,在該過程中由主節點在上電時分配節點地址。
硬連線或手動編程技術指的是配置一個系統或替換一個故障節點時,或者需要人工干預,或者需要依賴于提供大量具有不同LIN地址的節點。
自動尋址則相反,它指的是具有相同功能的模塊可連接到LIN網絡上,而無需區分它們的地址。
該過程根據節點在總線上的位置為各個節點分配地址。因此,自動節點位置檢測是自動尋址不可分割的一部分,這兩個術語(即節點位置檢測和自動尋址)有時是可以互換的。
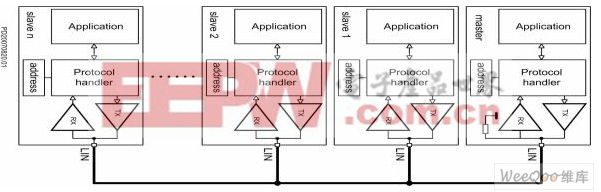
在基本LIN系統(圖1)中使用的有線“與”連接指的是所有節點均無法確定其在總線上相對于其它節點的位置。各總線連接方式在電性能上都是等效的。為了實現節點位置檢測并采用此方法進行自動尋址,必須采取其它措施確保每個節點都有可能在總線上確定其相對位置。
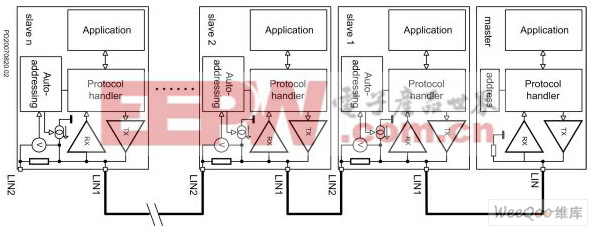
實現這一目標的一種方法就是:在各節點處將LIN線路隔離開,以便節點的物理層可以在節點分出的兩個總線部分之間通過電性能加以辨別(圖2)。每個節點上有兩個LIN連接,所有的節點均通過“菊花鏈”連接起來。每個從節點中均包括一個檢測電阻(通常為1Ω)和電流源(通常為2mA):距主節點最遠的從節點和總線之間只有一條單獨的連接(即沒有節點“下行”),沒有其它電流存在,因此可以由主節點進行識別并分配地址。一旦該從節點分配到地址,就可以通過終止其電流源來停止參與位置檢測過程。因此,總線上“下一個”從節點當前就是以該鏈路上“最后一個”節點的形式出現。該過程不斷繼續,直到所有節點都分配到各自的地址為止。
該技術的難點之一在于:在一個極易受電磁兼容性(EMC)以及其它電氣干擾的汽車環境里,需要相當精確的電流測量。由于各種干擾會導致位置檢測產生錯誤,因而該過程可能會相當耗時;而且該過程還需要一個主、從節點互連的固定拓撲結構作為單獨而無分支的線性總線(主節點位于一端)。最后,如有任何故障,該系統在故障節點的位置就無法傳遞任何信息。
通過采用安森美半導體公司(如圖3所示)提出的另一操作方法,這些問題均可迎刃而解。即仍然采用相同的通用原理,但是每個節點都含有一個高壓(HV)開關,從而允許從節點傳送或阻止總線兩個部分之間的通信。
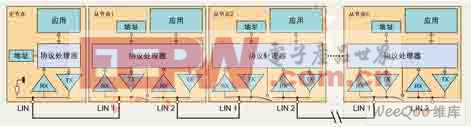
圖3:安森美半導體的解決方案在每個節點都含有一個高壓(HV)開關,從而允許從節點傳送或阻止總線兩個部分之間的通信。
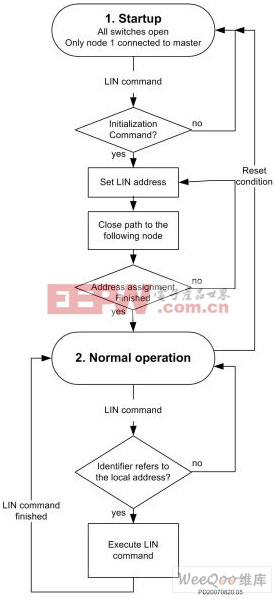
分配地址(如圖4所示)的過程始于啟動或重置階段,即當從節點進入初始狀態時,此時高壓開關處于開啟狀態。LIN總線的所有部分均被分隔開,只有與主節點直接相連的從節點才會對來自主節點的LIN信息頭做出反應。主節點發送初始化命令后,上述從節點獲得地址并關閉其通往總線下一部分的高壓開關。這使得第二個從節點可以和主節點進行聯絡,以便依次獲取其地址。該過程如此繼續下去,直到所有節點都獲得各自的地址為止。
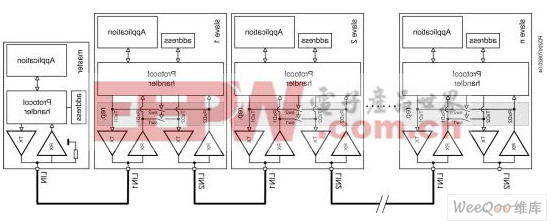
實際上,基于開關的系統在遵循上概基本原理的同時,通常要將開關功能從外部電子節點LIN1和LIN2移入收發器的低壓部分(如圖5所示)。實際上,每個從節點都包含了一個完整LIN收發器的兩種情況。信息流的傳播或阻止都是通過對發往各個發送器和來自各個接收器的邏輯信號進行控制而實現的。這免除了安裝能經受汽車系統中嚴苛環境條件(尤其是脈沖干擾、系統ESD和EMC)的開關的需求,且提高了可靠性。
在正常操作期間,為保證各電線部分在邏輯上表現為一根單獨的總線,每個從節點上發送器和接收器的邏輯互連電路必須確保總線信號雙向正確傳送。在其中一個LIN連接引腳上接收到的數據必須被發送至其它引腳,反之亦然。因此,數字模塊實際上起到了中繼系統的作用。
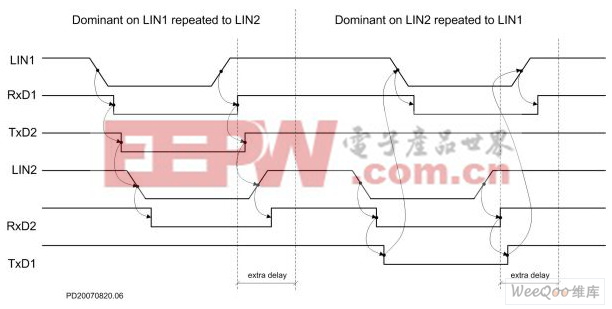
該設計對精確度的要求確保了系統時序的正確性(如圖6所示)。當其中一個LIN互連引腳接收到顯性狀態時,必須立即向其它LIN引腳重復發送,并進而發送到菊花鏈上。但是,當初始顯性狀態結束,中繼機制在將這種變化沿菊花鏈傳遞時不可避免地會有輕微的時間延遲。這樣一來,持續的顯性狀態自身可被傳回網絡的初始啟動部分,導致兩條總線將永久保持顯性的互鎖狀態。因此,必須引入額外延時概念,在此期間,總線狀態被視為不能夠有效重復。這種延時必須能夠涵蓋中繼系統最差情況下的總延時。額外延時的邏輯實現被稱為反饋抑制。當然,同樣的論點雙向適用。因而,包含反饋抑制的中繼器功能相對于兩個LIN連接是完全對稱的。










評論