淺析μC/OS-Ⅱ設備驅動的設計與實現

設備驅動程序是任何操作系統的必不可少的、最保密的一個組成部分,它們實現了計算機系統所有附屬設備的一個標準接口,它包含與硬件直接相關的設備驅動。從廣義上說,“驅動程序”是指一些函數的集合,這些函數都能對硬件設備進行操作。本文簡單分析了μC/OS-Ⅱ下設備驅動的設計與實現。
本文引用地址:http://www.j9360.com/article/148547.htm設備驅動程序是任何操作系統的必不可少的、最保密的一個組成部分,它們實現了計算機系統所有附屬設備的一個標準接口,它包含與硬件直接相關的設備驅動。從廣義上說,“驅動程序”是指一些函數的集合,這些函數都能對硬件設備進行操作。驅動程序的概念在沒有固定的操作系統的時候,是一個比較模糊的定義。簡單地理解就是提供了一個軟件到硬件(也可以是虛擬硬件)操作的函數。通常主要應該包括:設備初始化、設備的讀寫(輸入輸出)、設備的控制等信息。在μC/OS-Ⅱ下沒有統一的設備驅動接口——不像windows或者linux下通過設備文件的定義模式,所以,把一些對硬件操作是通過一般的函數來完成的,叫成“驅動程序”也不為過。
1. 簡介
外設驅動程序是實時內核和硬件之間的接口,是連接底層硬件和內核的紐帶。
編寫驅動程序模塊應滿足以下主要功能:
① 對設備初始化;
② 把數據從內核傳送到硬件和從硬件讀取數據;
③ 讀取應用程序傳送給設備的數據和回送應用程序請求的數據;
④ 監測和處理設備出現的異常。由于在μC/OS-Ⅱ下沒有統一的設備驅動接口,在該操作系統中設備驅動的設計和實現主要是通過一些對硬件操作的函數來完成。
2. μC/OS-Ⅱ操作系統啟動過程中的硬件初始化
基于μC/OS-II的應用系統工作時,首先把CPU初始化;接著進行操作系統初始化,主要完成任務控制塊(TCB)初始化、TCB優先級表初始化、空任務的創建等;然后開始創建新任務,并可在新創建的任務中再創建其他的新任務;最后調用OSSTART()函數啟動多任務調度。
當μC/OS-Ⅱ實際移植到具體的硬件平臺中時,系統初始化時還要進行硬件的初始化。主函數是系統啟動首先執行的一個函數,在啟動μC/OS—Ⅱ之前,要屏蔽所有中斷,并對全局變量初始化,防止運行出錯。硬件初始化主要包括中斷初始化,串口、鍵盤、顯示等設備初始化。μC/OS—Ⅱ的初始化通過調用OSInit()函數,為OS分配任務隊列、優先級狀態表和準備狀態表,初始化全局變量,并且創建一個空循環任務。接下來,在啟動μC/OS—Ⅱ前調用OSTaskCreate()創建所有用戶任務,并置準備態,創建任務時,要指定每個任務的優先級、堆棧大小和位置、任務函數入口。調用OS2Start()啟動μC/OS—Ⅱ。從就緒隊列中找到優先級最高的任務,作為當前任務執行。流程如圖所示。
3. μC/OS-Ⅱ操作系統對硬件的操作和控制
3.1 函數控制硬件
前面已經提到過,不像其他的操作系統,在μC/OS—Ⅱ中沒有統一的設備驅動接口,因此對硬件的操作和控制可以通過函數來完成。在啟動過程中完成硬件初始化后,系統創建一個空循環任務,然后就可以調用OSTaskCreate()創建用戶任務,在任務用戶任務中選擇要控制的硬件,選擇最佳的控制方法,調用用戶自己編寫的函數來完成。
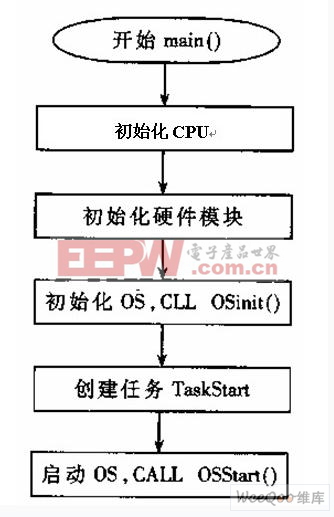
圖 系統啟動流程
3.2 BSP
BSP(板級支持包)是介于底層硬件和操作系統之間的軟件層次,它完成系統上電后最初的硬件和軟件初始化,并對底層硬件進行封裝,使得操作系統不再面對具體的操作。
為μC/OS-Ⅱ編寫一個簡單的 BSP。它首先設置CPU內部寄存器和系統堆棧,并初始化堆棧指針,建立程序的運行和調用環境;然后可以方便地使用C語言設置硬件的配置環境,并編制相應的操作函數,為操作系統調用提供統一的接口;在CPU、板級和程序自身初始化完成后,就可以把CPU的控制權交給操作系統了。
4. 實際應用舉例
既然在μC/OS-Ⅱ下沒有統一的設備驅動接口,系統對硬件的控制是通過一些對硬件操作的函數來完成的。下面以在μC/OS-Ⅱ實時內核下驅動程序讀取A/D的三種方法,分析在實際的工程實踐中μC/OS-Ⅱ設備驅動的設計和實現,以及在設計過程中應注意的一些問題。
以一個單片機數據采集系統為例,硬件環境基于C8051F015單片機。A/D轉換是單片機數據采集系統的重要組成部分,實時內核下A/D驅動程序的實現過程主要取決于A/D轉換器的轉換時間。我們首先比較和分析μC/OS-Ⅱ下A/D采樣數據的三種方法;其次介紹C8051F015單片機A/D模數轉換器的配置及特點;最后,在μC/OS-II內核移植到8位單片機C8051F015的基礎上,介紹編寫A/D驅動程序的一般思路和方法。
4.1 μC/OS-II實時內核下的A/D讀取方法
實時內核下,驅動程序采用什么方法讀取A/D采樣數據是首先考慮的問題。許多因素將影響讀取A/D,如A/D的轉換時間、模擬值的轉換頻率、輸入通道數等,但最主要的是取決于A/D的轉換時間。典型的A/D轉換電路由模擬多路復用器(M U X)、放大器和模數轉換器(ADC)三部分組成。下面描述讀取A/D的三種方法。
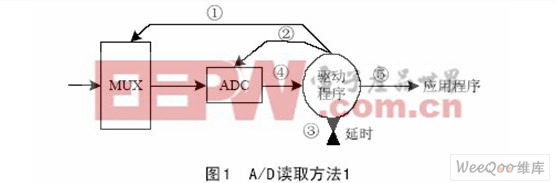
圖1所示的是第1種讀取方法。假設A/D 轉換器的轉換時間較慢(5ms以上),應用程序調用圖1所示的驅動程序,并傳遞要讀取的通道。驅動程序通過M U X選擇要讀取的模擬通道(①)開始讀。轉換前,延時幾μs以便使信號通過M U X傳遞,并使之穩定下來。接著,ADC被觸發開始轉換(②)。然后驅動程序延時一段時間以完成轉換(③)。延時時間必須比ADC轉換時間長。最后驅動程序讀取ADC轉換結果(④),并將轉換結果返回到應用程序(⑤)。
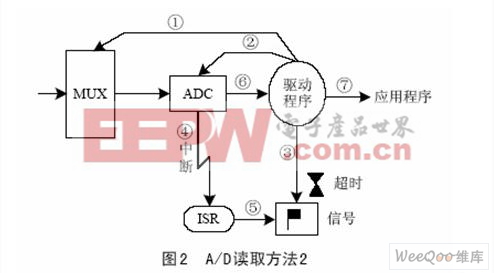
圖2所示的是第2種讀取方法。當模擬轉換完成后,ADC產生的一個中斷信號。若ADC轉換完成,ISR給信號量發一個信號(⑤),通知驅動程序,ADC已經完成轉換。如果ADC在規定的時限內沒有完成轉換,信號量超時(③),則驅動程序不再等待下去。驅動程序和中斷服務子程序(ISR)的偽代碼如下:





評論