基于CAN總線的嵌入式車燈監控系統設計

摘要:為了確保車燈的質量可靠性,提出了一種嵌入式車燈控制及電氣參數檢測系統的設計方案。系統包括上位機監控終端和下位機控制節點,監控終端負責設置各車燈的工作參數和顯示車燈的工作狀態;控制節點采用基于Cortex—M3內核的嵌入式微處理器LM3S2965為核心,將實時操作系統μCOS-II植入其中,提高系統的實時性和穩定性,同時將我國自主研發的iCAN協議應用到系統中,從而實現對車燈的網絡化監控。結果表明,系統最多可對63個車燈進行實時的電氣參數檢測與控制,具有較高的可靠性。
關鍵詞:車燈監控系統;μCOS-II;iCAN協議;LM3S2965
當前我國的汽車總數呈現爆發式增長,由于汽車照明與交通安全有著密不可分的關系,因此對車燈產品進行可靠性檢測是很有必要的。針對這種情況,提出了基于CAN總線的嵌入式車燈監控系統的設計思想,結合總線技術和單片機嵌入式技術,實現對車燈進行功能控制以及電壓電流參數檢測。其中,iCAN協議在CAN總線網絡中的使用,可以實現對多個車燈同時進行網絡化監控,進而可以實時準確地掌握各個車燈的工作情況,確保車燈產品的質量可靠性。
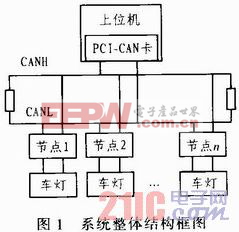
1 系統整體結構
系統主要由上位機和多個下位機節點組成。上位機是由VC編成的監測軟件,PC機通過PCI-CAN卡與CAN總線相連,完成與下位機節點的通信,顯示各車燈的電流電壓及工作情況,并完成功能的設置。下位機節點以LM3S2965為主體,采樣車燈工作時的電壓電流,并對車燈進行控制。系統整體結構框圖如圖1所示。
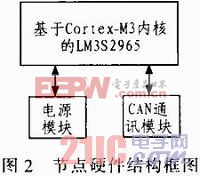
2 節點的硬件設計
下位機節點的硬件結構設計框圖如圖2所示。節點主要完成以下工作:1)定期對車燈工作時的電壓電流進行AD采樣,并將結果發送到CAN總線上,供上位機接收;2)接收上位機發送到CAN總線上的命令,并控制車燈實現相應的功能。因此,節點主要包括微處理器部分、CAN通訊模塊、電源模塊。
2.1 微處理器選型
為了確保系統對車燈進行實時、可靠地控制及檢測,這里選用可植入實時操作系統的Cortex-M3內核芯片LM3S2965。LM3S2965是南TI公司Stellaris所提供的首款基于ARM Cortex-M3的控制器對CAN總線應用方案而設計的芯片,具有較高的代碼密度和指令執行效率。片內有256 kB的單周期訪問的Flash,64KB的單周期SRAM,為操作系統的植入和運行提供了足夠的容量;內部集成了兼容CAN2.0A/B的CAN控制器和ADC模數轉換器,可以簡化節點中CAN通訊電路和AD采樣的電路的設計,同時也降低了軟件開發的難度。






評論