基于DM6446的視頻運動車輛檢測系統

摘 要: 給出了一種基于DM6446 處理器的視頻運動車輛檢測系統的技術實現方法,介紹了系統的硬件結構及軟件設計思路。結合DM6446 雙核處理器的特點,給出了處理器ARM 端與DSP 端通信及雙緩沖區切換的具體方法。在視頻運動車輛檢測算法上,采用差異積累法對DM6446 實時獲取的交通視頻數據進行背景建模,用背景差法檢測車輛運動區域,再結合Otsu 閾值化、形態學濾波及區域生長等算法,最終在DM6446 硬件平臺上實現視頻運動車輛的實時檢測。實驗結果表明,該系統具有良好檢測效果。
本文引用地址:http://www.j9360.com/article/148382.htm隨著現代交通運輸業的快速發展,道路上的車輛日益增多,而伴隨而來的交通擁堵、道路使用效率不高等問題卻給日常交通管理帶來了重重困難。融合了計算機、電子等現代高新科技的智能交通系統(ITS:Intelligent Transport System)提供了解決方法。
運動車輛檢測是ITS 的重要組成部分,本文探討了以TI 的TMS320DM6446(簡稱DM6446)為嵌入式開發平臺的交通視頻信息采集和處理系統的設計,通過分析實時交通視頻序列,采用差異積累背景建模、Otsu 自動閾值選取、形態學濾波及區域生長定位等技術,最終實現交通場景視頻運動車輛的檢測。
1 系統硬件構成
本系統選用的TMS320DM6446 是基于ARM926 和TMS320C64x+兩個核心的、高度集成的數字媒體處理器。ARM926EJ-S 采用管道化流水線可以執行32bit/16bit 指令集,并提供了獨立的16KB的指令Cache 和8KB 的數據Cache,可有效控制和管理外部中斷、各種接口及外設。TMS320C64x+屬TMS320C6000 系列高性能的定點DSP 處理器,集成了64 個32 位通用寄存器和8 個功能單元,硬件支持塊循環操作,采用二級Cache 結構:L1 程序/數據Cache 和L2 存儲/Cache.ARM 和DSP 共享外部256MB DDR SDRAM 存儲器,64MB NAND Flash用于存放ARM 和DSP 代碼。
系統硬件平臺還包含視頻處理子系統(VPSS)和眾多外設資源。VPSS 是DM6446 中專門負責視頻輸入輸出的硬件模塊,由視頻處理前端(VPFE)和視頻處理后端(VPBE)組成,系統模擬視頻信號經由TVP5150解碼器解碼成YUV422 格式的視頻數據后傳送給VPFE 的CCD 控制器,然后通過EMIF 接口將暫存在VPSS 內部Buffer 中的數據傳送到外部DDR SDRAM中。VPBE 的屏幕顯示(OSD)模塊將視頻數據以YCbCr形式提交給視頻編碼器(VENC),通過視頻編碼器輸出到VGA 或CVBS 接口。本文處理系統的硬件拓撲結構如圖1 所示。
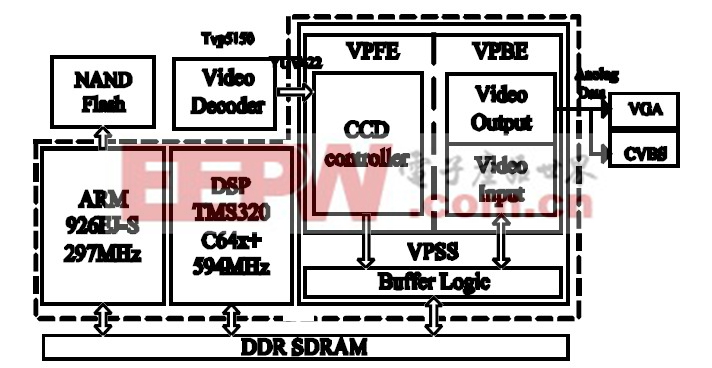
圖1 DM6446 系統平臺硬件結構示意圖
2 系統軟件設計
圖2 示意了系統硬件平臺軟件處理模塊的組成結構。如圖2 所示,軟件部分主要完成3 個任務:圖像的采集與存放、ARM 與DSP 通信和視頻圖像處理。

圖2 DM6446 系統平臺軟件模塊構成框圖。
ARM 端負責初始化系統并控制數據的采集和存放。系統初始化時VPSS 被配置為場模式,VPFE 負責將采集到的視頻數據連續傳送到內存緩沖區。由于ARM 端在向內存中存放圖像時DSP 端不能同時讀取,為了保證數據處理的正確性,本文采用雙緩沖機制,即:設定兩個各自連續的幀緩沖區VIDEO BUF0 和video BUF1,視頻數據交替的向這兩個區域緩沖刷新。
ARM 與DSP 兩核之間的通訊通過內存共享和中斷的方式實現。ARM 通過寄存器ARM2DSP0 向DSP發出中斷信號,DSP 使用寄存器DSP2ARM0 給ARM發送中斷信號。發中斷的一方在中斷信號發出前向共享內存填寫命令,接收中斷的一方在中斷函數中讀取命令,其他模塊按照當前的命令執行相應任務。
視頻圖像的處理在DSP 核上進行,采集到的視頻圖像數據為YUV422 格式,算法處理時僅讀取視頻數據的Y 分量,緊接將視頻數據進行差異積累背景建模、運動區域檢測等操作以實現對視頻序列運動目標的檢測。最后DSP 負責將檢測完的視頻數據存放至固定顯示緩存區,由VPBE 讀取后顯示。
3 視頻運動目標檢測算法設計
在獲得視頻數據后,需進一步對視頻運動目標進行檢測(運動車輛)。對固定相機的應用場合,一般采用背景差技術檢測視頻運動目標,而背景差法又受背景建模效果的約束。目前存在如基于光流場、目標模型以及差分圖像等多種視頻運動目標檢測方法。基于光流場的目標檢測法對噪聲敏感、計算量大,導致算法實時性較差。基于目標模型的檢測方法一般須建立目標的三維模型,再將模型投影至二維平面,再在圖像中進行匹配。基于差分圖像的檢測方法較為常用,可分為鄰幀差和背景差兩種方法,背景差法是視頻運動目標檢測中的流行方法。本文即采用背景差法對目標運動區域進行檢測,本文針對嵌入式應用,從檢測算法的處理效率出發,場景背景模型的獲取采用文獻[4]所述的基于差異積累的背景建模法。對視頻運動目標進行檢測主要經過四個步驟:差異積累背景建模、運動區域檢測、形態學濾波和區域生長法視頻運動目標定位。
3.1 差異積累背景建模
差異積累背景建模法首先要建立差異圖像,設差異圖像為F(i,j,t),當前視頻幀為f(i,j,tc),基準幀為f(i,j,tb), 則由當前幀與基準幀比對可以得到一幅差異圖像,可表示為公式(1):

這里的Tf 是一個特定的門限,決定著差異的程度。
若兩幅圖像間灰度差在其坐標上有較大的不同時,F(i,j,t)的值被賦為1,否則為0.這樣可以生成一個像素值為0 或1,大小與輸入圖像一致的圖像矩陣,稱為差異圖像。現在考慮一組m 幀視頻序列{f(i,j,t1),f(i,j,t2), …, f(i,j,tm)},本文選取視頻的第f(i,j,tc-3)幀作為基準幀,系統初始化時將讀取的第一幀視頻數據賦予基準幀,基準幀隨著視頻的輸入不斷迭代,程序實現時可按如下方式進行迭代:

差異圖像描述了視頻圖像中物體的運動,若在連續圖像序列中存在相對穩定的非運動區域則可考慮作為背景。差異圖像矩陣隨視頻幀變化而不斷改變,根據差異圖像每個像素值的變化程度可以得到一個差異積累動態矩陣D(i,j,t)。 如公式(2)所示:

λ記錄每個像素差異積累的深度,動態矩陣的單元數量和高寬比例與差異圖像矩陣相同,當差異圖像某位置處的值為0時使動態矩陣相同位置處的計數器加1,這種計數器在動態矩陣每個單元位置各有一個。在對視頻序列連續處理過程中,若動態矩陣元素的計數器值等于λ時,就認為對應位置的像素灰度值在規定范圍內無變化,可以作為背景像素。
背景的更新采用加權平均法,設更新前背景為Bold(i,j,t),新背景為Bnew(i,j,t),結合系數利用公式(3)可獲得當前更新的背景。應用場景的背景會隨著新視頻幀的輸入而不斷進行自動更新,圖3 示意了差異積累法的背景更新效果。
![]()
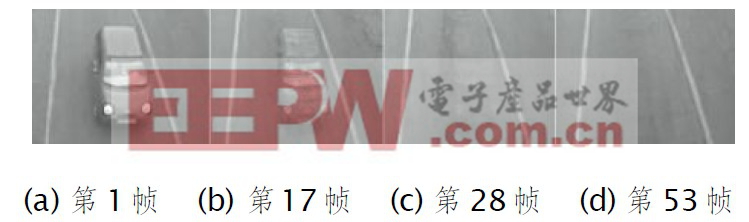
圖3 差異積累背景建模過程示意圖
3.2 運動區域檢測
在獲得背景模型后,采用背景差法即可獲得背景差圖,設背景差圖為Bd(i,j,t),則有:

對背景差圖做二值化處理即可獲得視頻運動車輛區域。本文二值化閾值選取采用文獻[5]的Otsu 法(最大類間方差法)。Otsu 法根據圖像的灰度特性,將圖像分成前景和背景兩部分。前景和背景之間的類間方差越大,說明構成圖像的兩部分差別越大,當部分前景錯分為背景或部分背景錯分為前景時都會導致兩部分差異變小,因此,使類間方差最大的分類意味著錯分概率最小,選取使類間方差最大和類內方差最小的圖像灰度值作為最佳閾值。








評論