基于μC/OS-II的數字化UPS設計與實現方案

摘 要: 針對數字化UPS,給出了系統總體設計框圖,為提高系統控制程序的實時性,提出一種基于實時操作系統μC/OS-II的嵌入式UPS 系統控制方案。通過對UPS控制系統結構與功能的分析,實現了μC/OS-II在TMS320LF2407A上的移植,對UPS系統控制項目以任務的形式進行設計并實現調度,給出了部分參數設定和主程序清單。實驗結果證明,本文的設計有效的增強了系統控制軟件的模塊性、實時性,提高了系統運行的可靠性與穩定性。
本文引用地址:http://www.j9360.com/article/148350.htm1 引言
隨著信息技術的發展,不間斷應急電源(UPS)向著數字化、智能化、網絡化、大容量多機冗余化和綠色化的方向發展。高性能專用DSP芯片為UPS的數字化提供了良好的硬件基礎,而嵌入式實時軟件操作系統是數字化產品的核心。
針對數字化UPS,本文給出了一種基于實時多任務操作系統μC/OS-II 的系統控制設計。設計采用μC/OS-II為內核,實現其在TMS320LF2407A上的移植,通過對UPS控制系統結構與功能的分析,各部分控制功能劃分為不同優先級的任務來調度實現,給出了部分參數設定和主程序清單。實踐證明,基于μC/OS-II 的數字化UPS 系統提高了控制系統的實時性以及系統運行的可靠性及穩定性。
2 數字化UPS控制系統結構
TMS320LF2407A 是TI 推出的專門針對工業控制領域的16 位高性能微控制器,其運算速度高、片內資源豐富,能夠很好的滿足數字化UPS電源控制系統功能的需要。數字化UPS 系統總體設計框圖如圖1 所示,虛線框內為主控制模塊,按功能劃分為A/D轉換、PWM(Pulse Wide Modulate)逆變控制、鎖相控制、保護控制、鍵盤及液晶顯示、通信接口、實時時鐘等功能模塊。
4 數字化UPS任務設計及調度
控制軟件主程序流程圖如圖3 所示。通過對UPS控制系統結構與功能的分析,各部分控制功能劃分為不同優先級的任務,由μC/OS-II實時內核進行調度,實現多任務并行執行。
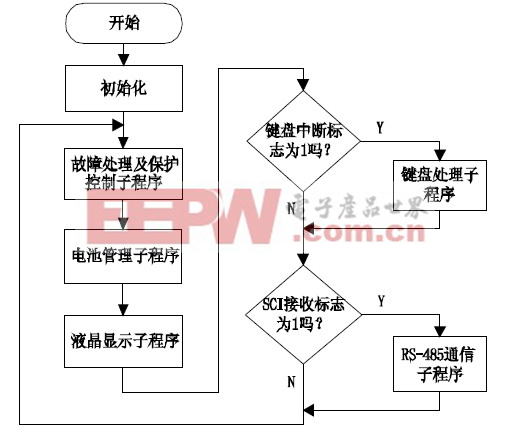
圖 3 主程序流程圖
(1)數字化UPS 任務設計:如表1 所示,采用層次化、模塊化的設計思想,根據各個任務的重要性和實時性,把用戶程序分成9 個不同優先級的任務,包括數據采集及PWM 波計算、鎖相同步、通信處理、系統參數計算、系統狀態檢測及處理、鍵盤掃描、鍵盤處理、液晶顯示、空閑任務。任務越重要,實時性越強,任務優先級越高。空閑任務不執行任何功能,一直處于就緒狀態,只有其他任務空閑時才執行。
表1 數字化UPS任務功能及其描述

(2) μC/OS-II 任務調度:完成任務在運行態、就緒態、掛起態、休眠態以及中斷態之間的轉換,是實時多任務操作系統運作的核心功能,流程如圖4所示。μC/OS-II 的任務調度是基于優先級的搶占式調度算法,系統共有9個任務和3個中斷。系統在任務控制塊(OS_TCB)中分配一個字(OSTCBPrio)來表示每個任務的優先級,數值越小優先級越高。當發生任務調度時,系統通過任務就緒表查找到優先級最高的任務后,調用函數OS_TASK_SW()完成任務切換。
(3) 數字化UPS 中斷:設計3 個硬件中斷,一個是AD 采樣中斷,優先級最高,采用自適應頻率方式每周期采樣32 個點;另一個是系統時鐘節拍中斷,優先級次之,每10ms中斷一次作為系統時鐘;最后是通信中斷,優先級低,當接收到外部數據時,便發生中斷并對接收的數據進行處理。
(4)任務間通信與同步:采用訪問共享數據資源的方式實現多任務間的通信,采用信號量進行任務間的同步。為實現任務間的同步,本軟件系統建立了3個信號量:
數據計算信號量OSPWMCntSem,用于任務1和數據采集PWM 波計算子程序通信。每完成一次中斷采樣便發出這個信號量,告訴任務1對 采集數據和PWM波進行計算處理。
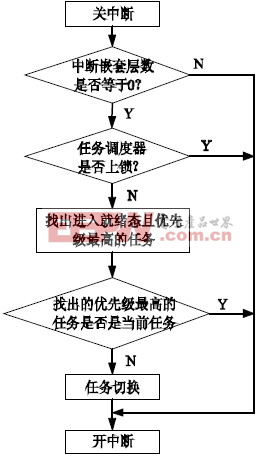
圖4 任務調度流程圖。
通信信號量OSComSem,用于任務3 和通信中斷子程序進行通信。一旦接收到上位機發過來的信號,中斷子程序就發出這個信號量,告訴任務4對接收數據進行處理。
鍵盤信號量OSKeySem,用于任務6 和任務7 通信,一旦掃描到有鍵按下則發出該信號量告訴任務7做鍵盤處理。
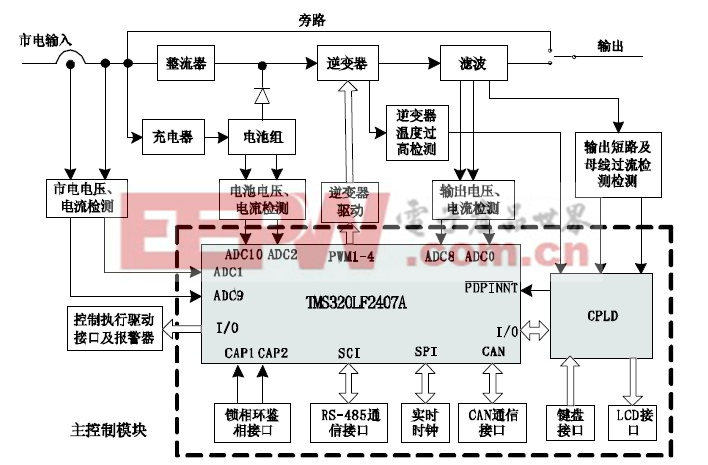
圖 1 數字化UPS系統總體框圖
(1)A/D轉換:完成對市電輸入的交流電壓、電流信號、逆變輸出的交流電壓、電流信號、電池電壓和電流信號的采樣,是系統數字化控制實現以及UPS遠程監控功能的基礎。根據LF2407A A/D轉換電平要求,被采樣信號必須通過信號檢測模塊變換為0~3V直流電平。為提高系統性能,對輸入/輸出電壓、電流進行瞬時值采樣,采樣頻率為10kHz.
(2) PWM 逆變控制:PWM 逆變控制算法是UPS系統控制的核心算法,它決定了UPS系統輸出性能。
逆變算法利用LF2407A 強大的數值運算性能以及高速計算能力實時在線計算出PWM信號脈寬,然后由A事件管理模塊(EVA)的全比較單元輸出4 路帶死區控制的PWM 信號(PWM1~4),這4 路PWM 信號經隔離驅動模塊驅動逆變器。
(3) 鎖相控制接口:利用LF2407A的事件捕獲端口CAP1 和CAP2,將市電輸入和逆變輸出經降壓及波形變換后送入CAP1 和CAP2,由LF2407A 通過軟件鎖相環算法實現逆變輸出電壓與市電電壓的同頻同相。
(4) 通信接口:為實現對UPS 的實時監控功能,主機需對UPS電源的各模擬參量采樣數據及表示工作狀態的開關量數據進行實時高速采集。利用LF2407A的SCI 異步通訊接口,采用RS-485 物理標準協議,實現UPS與主機的遠程通訊,以便對UPS設備狀態、各項參數及故障信息進行查詢。
(5) 鍵盤操作及液晶顯示:提供人機對話平臺,用戶通過鍵盤操作可設置運行模式、設備通信地址等信息;液晶顯示屏以圖文方式顯示工作狀態和參數信息,提供可視化菜單。
鎖相環相關文章:鎖相環原理





評論