基于DSP+CPLD的無刷直流電機三環控制設計

摘要:以先進的TMS320F2812型數字信號處理器(DSP)為主控制芯片,利用CPLD實現無刷直流電機(BLDCM)的邏輯換相,以位置環控制為主,速度環和電流環控制為輔,設計了一套BLDCM的三環控制系統。系統對數字電路與功率電路進行光耦隔離,確保整個系統具有良好的電磁兼容性。控制軟件采用定周期控制,循環等待中斷發生。實驗結果表明,該系統工作穩定、可靠,具有良好的動、靜態特性,且實時性強。
關鍵詞:無刷直流電機;三環控制;數字信號處理器
1 引言
現有的BLDCM控制系統大多采用單環控制,很難同時滿足系統的快速性、穩定性與準確性的要求。此處采用TMS320F2812型DSP為主控制芯片,采用EPM3128ATC100-10型CPLD實現BLDCM的邏輯換相與速度計算,實現了控制系統的電流環、速度環、位置環的三環控制。
2 系統組成和工作原理
三相BLDCM的三環控制框圖如圖1所示。

最內環為電流環,次內環為速度環,最外環為位置環。該三環控制以位置控制為最終目標,給定位置與位置反饋量形成偏差,經位置調節后產生速度參考量,它與速度反饋量的偏差經速度調節后形成電流參考量,它與電流反饋量的偏差經電流調節后形成PWM占空比的控制量,實現電動機的速度控制,最終實現整個系統的位置控制。
系統組成框圖如圖2所示。
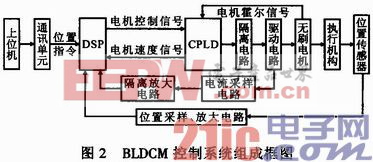
BLDCM的三環控制系統的基本工作原理為:①電機控制系統與上位機通過通訊單元進行實時通信;②DSP接收位置反饋信號、電流反饋信號、速度反饋信號后,根據位置指令和位置反饋信號形成的偏差信號進行控制律的計算,輸出電機控制信號;③CPLD對電機霍爾信號和電機控制信號進行邏輯處理產生6路控制功率管開關的相序,通過隔離電路輸入驅動電路;④驅動電路采用三相全橋方式,采用上橋臂調制方式,采用驅動芯片IR2130控制逆變電路MOSFET功率管的開通與關斷,實現電機的PWM控制;⑤電機電流經過電流采樣電路與隔離放大電路后,送入DSP,形成電流環。CPLD接收電機霍爾信號,經計算得到電機速度信息,送入DSP,形成速度環。電機輸出帶動執行機構運轉,位置傳感器實時檢測執行機構的位置信息,通過位置采樣、放大電路反饋給DSP,實現位置環。







評論