56F8013程序Flash的在線可編程特性及應用

摘要: 本文在介紹56F8013的Flash編程方法的基礎之上,描述一種它的自舉程序(Bootloader)實現方法。該方法應用在智能汽車競賽直立車模控制系統開發過程中,加快了車模現場調試的過程。該方法原理同樣適應于飛思卡爾公司數字信號控制器系列其它單片機開發。
本文引用地址:http://www.j9360.com/article/135966.htm智能汽車競賽要求必須采用飛思卡爾公司的微控制器作為控制單元的核心芯片,數字信號控制器(DSC)系列具有運算速度快、功耗低、外圍設備豐富等特點,非常適合智能汽車競賽車模控制。在競賽秘書處提供的直立車模控制參考方案中就采用了DSC56F8013芯片組成控制核心電路[1]。該芯片不僅內部硬件資源可以滿足車模控制要求,而且它的軟件開發環境Codewarrior中的PE(Processor Expert)可以自動生成芯片中各硬件模塊的接口代碼,使得開發者只需關注應用軟件的開發,這樣便可以提高軟件的開發效率和準確性。
在DSC56F8013的程序開發和調試中,可以使用專用的JTEG調試工具,這種方式在車模控制系統開發中具有一定缺點。車模現場調試中,單片機的代碼和參數需要頻繁的進行更新,使用JTEG調試工具,調試接頭的引線很多,插拔接頭不便。特別是無法在車模運行時實時監測內部程序控制參數。
自舉程序(Bootloader)設計
實現IAP過程中,一般將更新程序功能的代碼設計成獨立的自舉程序(Bootloader)模塊。將它燒寫在單片機內部特定的位置。
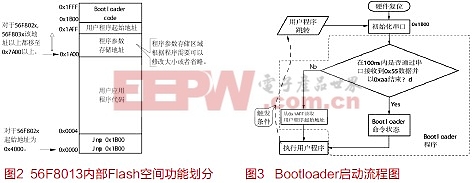
通過自舉程序下載單片機程序的系統硬件連接如圖1所示。

56F8013電路板通過串口電平轉換器與上位計算機相連。這個串口既可以下載單片機應用程序,同時也可以對單片機程序運行進行監控。實現Bootloader功能包括單片機程序和上位計算機的下載程序兩部分,下面分別進行介紹。
Bootloader程序的功能描述和開發
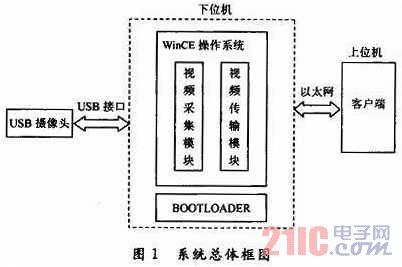
根據上述代碼空間劃定,單片機在復位之后,首先執行Bootloader程序,在Bootloader程序中,先檢查在一定時間內(一般設置為100ms左右)是否接受到用戶通過串口發送的0x55數據。如果受到了0x55數據,并在最后由0xaa數據結束,便進入Bootloader命令狀態,接受相應的程序下載指令,進行程序的更新。否則便從0x1AFF讀取用戶程序的起始地址,開始執行用戶程序。具體的啟動過程如圖3所示。
也可以通過設定一定的觸發條件從用戶程序直接跳轉至Bootloader程序。在Bootloader命令狀態下,可以接收上位計算機發送一組處理命令,如表1所示。上位機程序通過上述三個基本命令便可以完成對56F8013內部Flash的編程。

開發Bootloader程序可以在CodeWarrior提供創建新工程文件serial_bootloader模板基礎上進行改寫完成。模板serial_bootloader提供了Bootloader程序所必需的串口通訊、Flash讀寫子程序[3]。特別是Flash訪問程序比起PE生成的子程序更加簡捷。雖然在serial_bootloader模板中已經可以直接接收通過超級終端發送的S-記錄格式的單片機程序完成程序的下載功能,但效率低,而且用戶程序開發不方便。通過重新改寫之后,可以直接下載程序的二進制代碼,可以提高下載速度,方便用戶程序開發。









評論