智能車模雙電機差速控制的可行性研究

摘要:本系統采用飛思卡爾C型仿真車模,以飛思卡爾9S12系列單片機為整車的控制器,以CCD數字攝像頭進行路徑識別,7.2V鎳鎘電池供電,針對雙電機獨立驅動電動車電子差速問題進行了研究,提出了伺服電機轉角與雙電機差速的映射關系的相應曲線與數學模型。
本文引用地址:http://www.j9360.com/article/135915.htm前言
目前電動車主要的驅動方式有集中驅動式、雙電機獨立驅動式(前驅式和后驅式)及四電機四輪獨立驅動式等形式。不論采用何種驅動方式,當汽車在不平路面上行駛或轉向時,驅動輪都會遇到差速問題。由于各種電動車采用的驅動方式和控制策略不同,相應的電子差速器的設計也不盡相同。文章基于Ackerman轉向數學模型為理論基礎,通過采用閉環有差反饋式調節系統實現電動車的電子差速策略,在MATLAB/Simulink模塊中建立電機和差速系統的模型,所建差速控制系統的仿真結果表明電子差速系統能夠根據控制參數進行良好的控制,能較好地滿足電動汽車的驅動要求。
雙電機獨立驅動電動車的系統結構
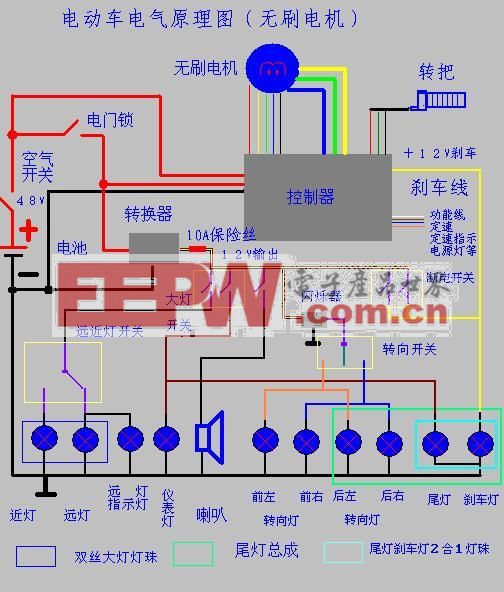
雙電機獨立驅動電動車系統結構,如圖1所示。該電動車采用7.2V鎳鎘電池給電機供電,2臺直流無刷電機分別直接安裝在2個后車輪內,形成前輪轉向、后輪驅動的方式。每臺電機都有單獨的控制器和測速系統,能夠實時檢測左右電機速度,整車控制器通過接收舵機轉角、攝像頭路況信息、電池、電機驅動控制器及車輪轉速等信號,并根據內部控制策略,以高速平穩過彎為目標,通過控制器改變控制信號的PWM電壓輸出值,以此來控制2臺電機的電壓值,調節2臺電機的轉速,從而控制驅動車輪的轉速。系統同時采用無線模塊與上位機相結合的方式實時檢測速度曲線,優化系統參數,以致達到更平滑的過彎效果。
基于轉速調節的差速方案
方案介紹
要解決差速問題,最直觀的就是控制兩個驅動輪的轉速,使其滿足Ackerman模型的要求。
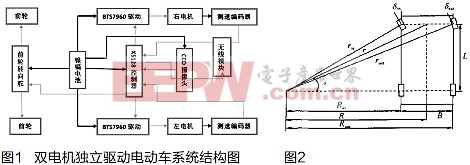
以圖2所示的兩軸車為例,阿克曼理論轉向特性,是以汽車前輪定位角都等于零、行走系統為剛性、汽車行駛過程中無側向力為假設條件的。該轉向特性的特點為:①汽車直線行駛時,4個車輪的軸線都互相平行,而且垂直于汽車縱向中心面;②汽車在轉向行駛過程中,全部車輪都必須繞一個瞬時中心點做圓周滾動,而且前內輪與前外輪的轉角應滿足下面關系式:
ctgβ-ctgα=K/L
式中:β為汽車前外輪轉角,α—汽車前內輪轉角,K為兩主銷中心距,L為軸距。
但是,該模型在理想條件下可行,而在實際系統中是不可能滿足上述條件的。所以我們對該模型在算法上進行了相應的改進,在實際車模硬件電路設計中也盡量考慮減小機械因素的干擾。


伺服電機相關文章:伺服電機工作原理
攝像頭相關文章:攝像頭原理 全息投影相關文章:全息投影原理


評論