智能車高速穩定行駛局部路徑規劃算法
—— Local Path Planning Algorithm for High-speed and Stable Running of Smart Car

引言
本文引用地址:http://www.j9360.com/article/109143.htm智能車高速入彎時,若地面附著力不足以提供轉向向心力,將導致側滑等危險發生。智能車能否以較高平均車速安全駛過彎道,取決于路徑規劃基礎上的轉向半徑與車速的合理匹配。本文采用局部優化對智能車CCD攝像頭視野內的道路進行路徑規劃。局部優化算法包括人工勢場[1]、模糊[2]、遺傳[3]、蟻群[4]及粒子群算法[5]等,它們對硬件實時性要求較高。本文考慮智能車和道路幾何尺寸,智能車及CCD的位置與姿態,以及彎道類型等因素,建立了簡單可行且滿足實時性要求的局部路徑規劃算法,進而確定了智能車高速穩定行駛的轉向角和車速。
局部路徑規劃算法流程
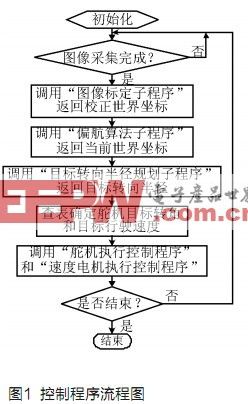
控制程序流程如圖1所示。首先,采集圖像信號并去噪、提取道路中心線;然后,計算并返回圖像失真校正后的世界坐標;第三,計算并返回偏航計算后的當前時刻世界坐標;第四,計算并返回路徑規劃算法得到的目標轉向半徑;最后,查詢預儲存在ROM內的舵機轉角和行駛速度,并調用執行程序,完成對智能車的控制。
CCD傳感器圖像信息采集
CCD輸出標準PAL制信號,LM1881視頻同步分離芯片提取行同步和場同步信號,進而觸發單片機圖像采集中斷,通過A/D模塊將視頻信號轉換為數字信號。CCD輸出圖像分辨率為320×600,考慮單片機內存和運算速度限制,取分辨率為37×150。











評論