3.3VCC供電下實現標準的HS-CAN通信

電磁兼容性
本文引用地址:http://www.j9360.com/article/106926.htmCAN應用中滿足電磁兼容性(EMC)要求是設計中所面臨的挑戰,特別是收發器采用開關電源調節器供電時。CAN系統的電纜是實際應用中需要關注的問題,因為CAN_H和CAN_L引腳連接至總線網絡,總線網絡涉及整個汽車的運轉。如果不夠謹慎,可能遇到干擾或產生干擾信號,通過CAN電源傳遞到收發器,進而注入整個總線,對相鄰電纜產生干擾。這些干擾會造成通信錯誤或系統的其它控制單元出現故障。考慮到上述因素,我們對采用MAX683電荷泵供電的MAX13041進行了EMC測試,并與由標準5V電源供電的MAX13041的EMC性能進行對比,觀察電荷泵對EMC干擾的影響。在此,我們將考慮兩個方面:電磁干擾抑制(EMI)和電磁輻射(EME)。
抗擾性測試
ISO 11452規范給出了幾種針對RF干擾抑制能力測試的方法,包括:大電流注入(BCI)、橫向電磁波箱(TEM-cell)、帶狀線以及直接射頻功率注入(DPI)。
我們采用DPI進行測試,原因是該方法具有高重現性(由于采用定義完善的測試板)和相對低的測試成本。DPI測試原理是向總線電纜注入特定交流電壓,該電壓可以經過調制,也可以未經調制,然后檢測收發器RXD引腳傳輸數據信號的完整性。這種方法還有助于比較不同供應商的設計;此外,它利用獨立實驗室(例如,IBEE-Ingenieur Buereo fuer industrielle Elektronik)測試CAN收發器。
測試裝置
測試裝置(圖3)包括三個同樣的收發器,焊接到指定的PCB,其中一片采用MAX683電荷泵供電。節點1作為發送器,用于模擬在所有收發器的Rx_輸出端接收、監測到的CAN信息的位模板。Rx1至Rx3輸出以及Tx1輸入端的RF去耦均采用1kΩ電阻。每片收發器IC的VCC和VBAT電源端均采用陶瓷電容(C=100nF)去耦。喚醒引腳的電阻值為33kΩ。通過把EN引腳和低電平有效STB引腳置高,可將器件置于正常工作模式。節點1的VCC電壓由MAX683電荷泵提供,MAX683由3.3V供電。3.3V電源還用于收發器節點1的VI/O電源。
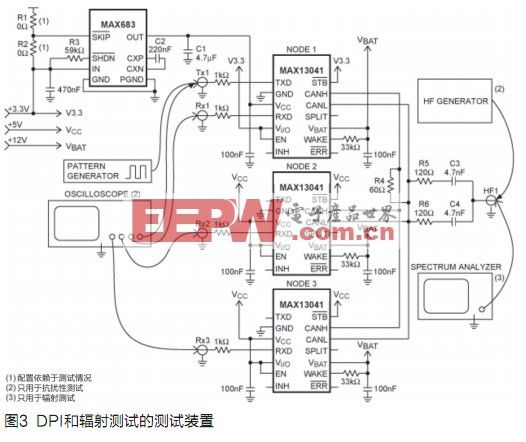
通過跳線選擇電阻R1或R2,可使電荷泵在跳頻模式和固定頻率模式(CFM)之間切換。電荷泵開關頻率通過59kΩ的R3電阻設置為2MHz。電荷泵的輸出電容C1為4.7mF、飛電容C2為220nF,并且輸入IN引腳通過470nF電容去耦。測試電路中,總線終端匹配通過60Ω的R4電阻中間端接實現。R5/R6 = 120Ω、C3/C4 = 4.7nF并聯的RC組合構成對稱的RF耦合/去耦。外部3.3V、5V以及12V電源由標準電源提供,由濾波網絡濾波。
測試步驟
測試中MAX13041 CAN收發器置于常規工作模式,電荷泵采用固定頻率模式測試一次,并采用跳頻模式再測試一次。第一次測試中所有收發器均采用標準的VCC=5V電源供電。模板發生器產生占空比為50%的方波,模擬節點1 TXD引腳的250kb/s CAN信號(數據保持在固定的0-1-0交替信號)。RF輸入(HF1)上的HF發生器在CAN電纜上注入特定頻率、功率相當于36dBm的調幅(AM)交流電壓,用于模擬干擾。為評估干擾抑制能力,用示波器監測網絡中所有三個收發器的RX信號,比較它們在干擾信號下對TXD信號的影響。有效模板所允許的最大電壓偏差為±0.9V,最大時間偏差為±0.2ms,利用該模板驗證TXD信號波形。
如果測試結果達到了失效水平(例如,收發器的RX信號超出有效模板窗口),則將RF注入功率降低0.2dBm,并重復同一測試(以特定的頻率等級),直到失效判據無效為止;隨后記錄當前的功率值并調節至下一個頻率等級,該測試的頻率范圍為10MHz至100MHz。

數字通信相關文章:數字通信原理
通信相關文章:通信原理
電荷放大器相關文章:電荷放大器原理







評論