靈活的現代CPLD汽車數字儀表板

汽車儀表板成為匯集車輛安全和管理所有信息的神經中樞,為駕駛員顯示各種信息。在當今的數字時代,車輛儀表系統必須能夠監控所有關鍵功能,該系統甚至是個性化的。業界需求發展導致出現了很多半導體解決方案,從ASSP到全定制器件等。這些方案可能都是功能固定的解決方案,不能靈活地進行產品開發,無法滿足設計人員的要求。作為對比,可更新解決方案在一條車輛產品線上支持多種相似的應用,沒有任何多余的成本開銷。這類定制解決方案以很低的成本滿足了所有需求。
本文引用地址:http://www.j9360.com/article/104845.htm本文簡要介紹一種創新的CPLD體系結構,完全避免了使用微控制器及其驅動器,從而提供了低成本、低功耗組合數字儀表板解決方案。這一模擬儀表板解決方案(ADS)高效地實現了數字汽車網絡,充分發揮了數字技術的優勢。
組合儀表板解決方案
傳統上,以機械方式獲得行駛里程等儀表實時輸出,使用模擬驅動器進行顯示。然而,隨著這些數據輸入的數字化,步進電機和LED替代了儀表和量表。采用昂貴的微控制器來處理并顯示數字輸出。后來出現了ASSP,導致較高的一次性成本開支(NRE),限制了產品更新和改進。產品生命周期以及對不同產品線的支持也是促使采用低廉的可編程替代產品的主要因素。
在指針式儀表顯示板上采用了步進電機,將電脈沖轉換成不連續的機械動作。當電控制脈沖按照一定的順序加到步進電機上時,電機軸以不連續的步進增量進行旋轉。組合數字儀表一般采用步進電機來仿效模擬面板和指針顯示板的性能以及視覺效果,同時提供數字設置需要的非常精確的位置信息。需要對這些電機進行微步進控制,以實現平穩連續的指針移動。此外,測得的采樣值從車輛傳感器廣播到相應的儀表部位,而采樣數受限于數字鏈路的帶寬,在一定的時間間隔后,每一測量采樣值才顯示在組合儀表上。在這類組合儀表上,迫切需要采取措施克服不能連續顯示信息的難題,當傳感器沒有向儀表輸出數據時,確保指針處于正確的位置。要解決這些難題,必須提高處理能力,從而增加了數字儀表板系統成本,較低的性價比阻礙了其在車輛中的應用。
基于CPLD的組合儀表板控制器
使用CPLD很容易克服這種高成本解決方案所帶來的限制。采用ADS,客戶只需要在設計中更新或者修改編程文件,實現產品換代,因此,非常靈活。此外,還可以在現場增添新功能或者更新產品,不但提高了技術實現效率,而且還滿足了特殊的用戶和產品需求。使用相同的基本系統,稍作改動,就很容易在新產品線上采用不同的器件。
利用基于CPLD的ADS,產品開發人員和生產商可以根據需要從不同的器件中進行選擇,而不用擔心半導體元件過時的問題。它具有較低的銷售價格,支持高端功能,未來擴展余地非常大。其體系結構使用Altera的MAX II CPLD,包括6個模塊:串行傳感器數據單元、主移動控制和算術單元,以及4個PWM發生器。串行傳感器數據單元接收來自傳感器的輸入,主移動控制和算術單元完成必要的計算,PWM發生器為步進電機所有相位提供合適的控制信號,接收來自主模塊的命令(圖1)。
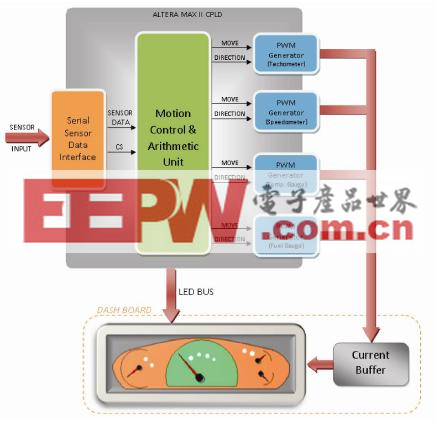
圖1. 基于CPLD的ADS結構圖
在詳細說明這一ADS體系結構之前,首先要理解窄帶車輛數據網絡中不同模塊的功能,以及驅動指針儀表板的步進電機是怎樣完成微步進控制的。由于組合儀表所有顯示面板并不需要連續的傳感器數據,當沒有數據時,系統保持指針位置不變。為實現平穩顯示,發送給指針的移動命令是當前偏轉函數,不會產生急促的指針步進變化。
PWM發生器
4個PWM發生器模塊驅動指針儀表板步進電機,指示來自不同傳感器的數據(圖2)。
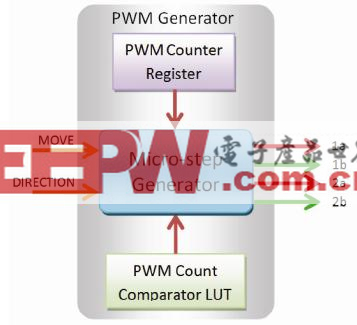
圖2. PWM發生器基本結構圖
微步進控制功能用于驅動電機,產生平穩的電機旋轉。在微步進控制中,電機產生的磁場不是和激勵線圈平行,而是有一定的角度。這樣,能夠在更多的位置產生保持轉矩,使轉子保持在激勵線圈兩個極軸之間。激勵線圈加電后,產生的磁通量與流過的電流成正比。如果所有激勵線圈加電,就可以通過兩個繞組電流的矢量和得到電流方向以及磁場。因此,如果步進電機繞組中的電流逐漸增大,那么可以產生激勵磁場的一組等距位置,提高電機的步進精度。利用這一原理,步進電機的步長被分成轉軸實際轉動的微步長(圖3)。
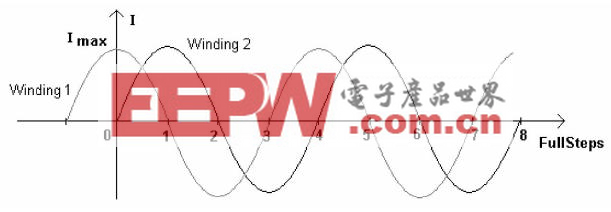
圖3. 微步長控制期間的兩個正弦電流波形
4個PWM模塊向步進電機提供固定占空比的恒定PWM脈沖,使指針按照一定的速度轉動,4個步進電機保持恒速轉動。它們接收來自移動控制單元的移動命令以及方向輸入,在繞組上輸入合適的電壓,使每個電機在要求的方向上轉動一個微步長。
移動控制和算術單元
delta發生器是移動控制和算術單元的主要組件。該模塊接收來自傳感器的4個步進電機中每個電機的目標偏轉信號。接收到目標偏轉信號后,兩路信號被送入各自的PWM模塊中。一路信號,也就是觸發脈沖,將當前的占空比值改為PWM模塊中的下一值。因此,當跨距范圍較大時,以較高的頻率發送脈沖,PWM模塊快速遍歷各占空比值,從而使步進電機以較高的速度旋轉。當指針達到目標偏轉位置后,停止向PWM模塊發送觸發脈沖,而PWM模塊輸出占空比恒定的脈沖,使轉軸有效地保持位置不變。另一路信號指示PWM模塊,指針應向哪一方向轉動。
delta發生器還有另一重要功能,周期性地發送代表采樣值的數據。如果這一信息直接加在步進電機上,那么,指針會急促轉動。為避免出現這種轉動,delta發生器使用修正后的數值,表示為delta δ。每次接收到新的目標偏轉值后,發生器針對這一指針值重新計算δ。然后,將這一遞增值δ加到指針當前偏轉上,其處理速率要比接收到新目標偏轉值的情況快得多。在整個過程中,持續監視單元的當前偏轉。當它變化時,發送使步進電機按照要求方向步進一個微步長的命令。如果目標偏轉值大于當前偏轉值,那么為順時針方向,如果小于當前偏轉值,則為逆時針方向。
這樣,在接收兩個目標偏轉值間隔期間,指針以較快的速率旋轉,通過較小的步長達到目標值,從而產生平穩的旋轉。它推斷出能夠覆蓋這一間隔合適的值,無論輸入怎樣變化,都能夠保持平穩轉動。
傳感器數據輸入單元
傳感器數據輸入單元使用SPI接口,支持與慢速外設之間的通信,可以周期性的訪問這些外設。采用主機/從機方式和外設進行通信,由主機發起數據幀。當主機產生一個時鐘信號,選擇從機器件后,可以單向或者雙向傳送數據。在CPLD后面實現SPI從機模塊,以便系統輸入。傳感器數據導入到算術和移動控制單元,是某一傳感器或者新LED數據的目標偏轉值。傳感器數據和目標地址一同發送,以區別其來源。
很容易在不同的平臺上調整基于CPLD的ADS,提高其精度,實現更高端的功能。它能夠為不同的車型提供不同的裝配布局,只需要在程序上稍作改動,幾乎沒有額外成本,開發時間呈指數下降。ADS可以結合可靠的公用汽車數字數據網絡,融入到生產工藝中,而靈活的CPLD很容易實現置入式功能。
結論
使用低成本、低邏輯密度CPLD,可以實現復雜的ADS,克服傳統儀表板解決方案的缺點。由于ADS具有內在的可編程優勢,設計重用意味著能夠使用越來越多的IP和內核庫來迅速開發其他解決方案。很容易重新進行配置,更快地向用戶推出新產品。由于產品生命周期較長,比較容易收回NRE,生產商能夠延長已經開發的產品的生命周期,而且沒有新的NRE投入。









評論