Chai3D之觸覺設備

推薦:將 NSDT場景編輯器 加入你的3D開發工具鏈
介紹??觸覺設備是一種雙向儀表/致動的人機界面,由人類操作員用于與計算機模擬虛擬環境進行主動交互。觸覺設備可以是鼠標、方向盤、指墊、機器人手柄、抓手、操縱桿、手套、磁懸浮手腕,甚至是移動整個用戶身體的運動平臺的形式。它可用于模擬具有質量、阻尼、摩擦和剛度屬性的環境,也可以模擬虛擬工具與其周圍虛擬環境交互的機械行為。
??CHAI3D 提供了一個名為 cGenericHapticDevice 的基類,它實現了一組與最常見的 3D 觸覺設備進行通信的方法。觸覺設備的末端執行器或手柄的位置可以通過使用getPosition(),getRotation(),getGripperAngleDeg()等方法讀取。可選的用戶開關或按鈕可以通過調用getUserSwitch()來讀取。
??力和扭矩可以通過調用諸如setForce(),setForceAndTorque()和setForceAndTorqueAndGripperForce()等方法發送到觸覺設備。
??對于每種型號的觸覺設備(例如delta.x,omega.x獵鷹,幻影等)CHAI3D 實現了一個特定的類(例如 cDeltaDevice、cPhantomDevice),該類繼承自 cGenericHapticDevice,并通過從支持該設備的 API 調用特定命令來實現每個命令。
一般規定??所有數量均以IUS(公制)單位表示。參考設備坐標系指定 x 軸指向操作員,y 軸指向操作員的右側,z 軸指向上方。最后,原點始終位于設備物理工作區的中心。
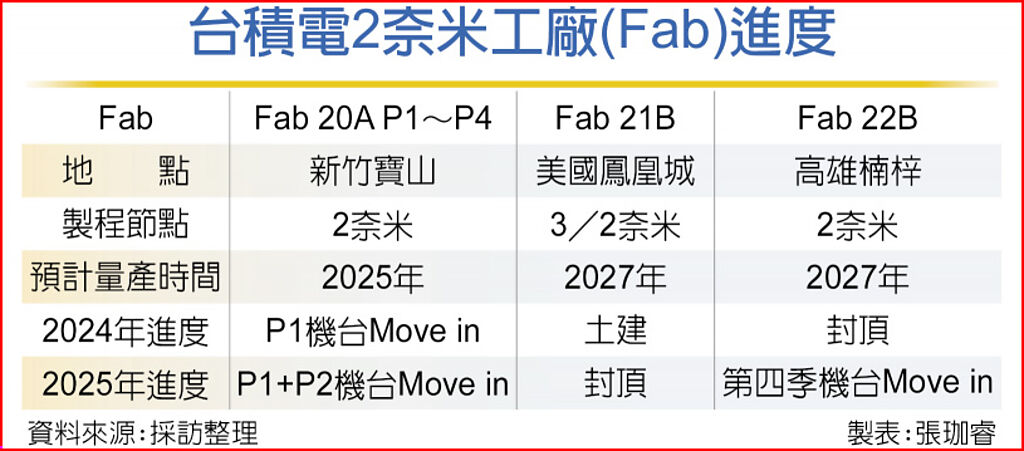
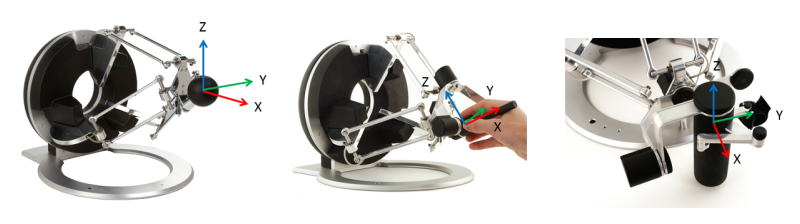
??如果觸覺設備帶有手腕或手寫筆,則其手柄的方向使用旋轉矩陣表示。下圖說明了三自由度、六自由度和七自由度設備的約定。
 三自由度、六自由度和七自由度觸覺設備的參考框架。
三自由度、六自由度和七自由度觸覺設備的參考框架。??示例 02-multi-devices 是一個簡單的應用程序,它顯示連接到計算機的每個觸覺設備的參考幀。參考框架使用顏色而不是標簽來命名不同的軸(分別為 x、y 和 z)。顏色約定為:紅色表示 x 軸,綠色表示 y 軸,藍色表示 z 軸。
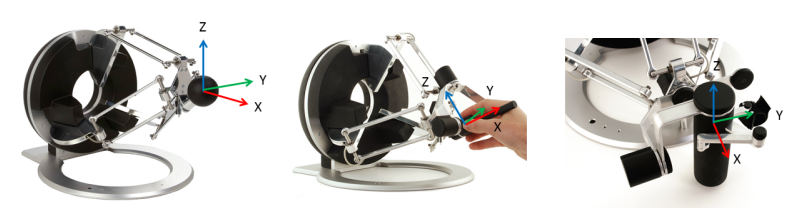
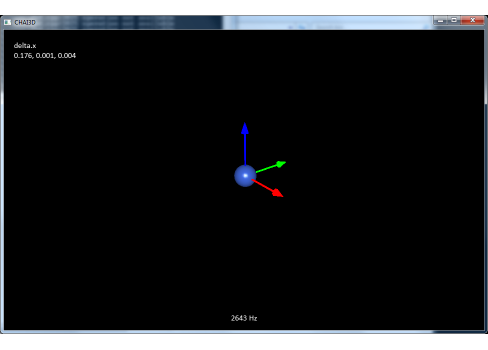 CHAI3D 示例 02-多設備:參考幀和光標。觸覺設備處理程序
CHAI3D 示例 02-多設備:參考幀和光標。觸覺設備處理程序??觸覺設備處理程序 (cHapticDeviceHandler) 是一個類,用于搜索并列出連接到計算機的所有觸覺設備。
??在下面的列表中,我們說明了一個簡單的示例,該示例對觸覺設備施加力,使其末端執行器朝向其工作空間的中心點:
using namespace chai3d;
// create haptic device handler
cHapticDeviceHandler* handler;
handler = new cHapticDeviceHandler();
// get handle to first available haptic device on the list
cGenericHapticDevice* hapticDevice;
handler->getDevice(hapticDevice, 0);
// open connection to haptic device
hapticDevice->open();
// initialize simulation
bool simulationRunning = true;
double Kp = 25;
cVector3d position(0,0,0);
// haptics loop
while (simulationRunning)
{
// read position from haptic device
hapticDevice->getPosition(position);
// compute force cVector3d force = -Kp * position; // send force to haptic device hapticDevice->setForce(force);
}
// close connection to haptic device
hapticDevice->close();
??cMyCustomDevice 提供了一個基本模板,可讓您非常輕松地將 CHAI3D 連接到您自己的自定義觸覺設備。只需按照文件 CMyCustomDevice 中的 12 個注釋步驟操作.cpp并相應地完成代碼。根據設備上的自由度數,可能需要實現并非所有方法。例如,如果您的設備不提供任何旋轉自由度,只需忽略 getRotation() 方法即可。如果未在設備上實現默認值,則將正確返回默認值。例如,在旋轉的情況下,返回單位矩陣。
??您還可以重命名此類,在這種情況下,您還需要自定義觸覺處理程序以自動檢測您的設備。請查閱 cHapticDeviceHandler 類的方法 update(),該類位于文件 CHapticDeviceHandler.cpp 中。只需查看觸覺設備處理程序如何查找 cMyCustomDevice 類型的設備。
??如果您在實現時遇到任何問題,請檢查實例文件 CDeltaDevices.cpp該文件實現了對力維度和 Novint 觸覺設備的支持。為了驗證實現,請使用01-mydevice示例開始。示例 11-effects 是一個很好的演示,用于驗證基本觸覺效果在觸覺設備上的行為方式。如果您確實遇到振動或不穩定性,請嘗試降低設備支持的最大剛度(請參閱文件 CMyCustomDevice.cpp 中的 STEP1)。
??確保您的設備與計算機的通信速度也足夠快。理想情況下,通信周期應小于1ms,以達到至少1000Hz的所需更新速率。例如,使用慢速串行端口 (RS232) 時通常會出現問題。
3D建模學習工作室翻譯整理,轉載請標明出處!
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。