中國版人形機器人來了!34個自由度,“手眼足腦”超級復雜!

北京時間10月1日,特斯拉舉辦2022 AI Day活動,Tesla Bot人形機器人擎天柱(Optimus)原型機在全球精彩首秀。馬斯克透露,該機器人產量應該可以達到數百萬臺,預估最終價格將在2萬美元以下,3至5年間即可量產上市。

無獨有偶,2022年8月11日,小米北京秋季新品發布會上,小米首款全尺寸人形仿生機器人CyberOne也正式亮相。
刑天機器人長相酷似變形金剛,極其“吸睛”。不僅擁有類似人類的雙足,還有完整的頭顱、軀干。1.7m 的個子,卻有34個自由度。它由20多位研發人員,在短短2-3年時間,自主研發而成。
,時長00:06
人形智能機器人在工業自動化、航空航天和社會服務中將發揮關鍵作用。人形機器人是一個復雜的光機電系統,具有多個自由度,運動操作更加靈活,非但能模擬人的結構與操作,甚至可以實現很多人類的行為與智能。
因此為滿足仿人需要,刑天身上采用了仿生機構設計、結構輕量化設計、多傳感信息感知與融合、人機交互實時控制和多學科系統集成等關鍵技術。
“它能實現對步伐的大小、快慢及幅度的控制。還具有典型環境和常見物體感知識別能力,能針對復雜地面環境自主規劃路線、避障等。”
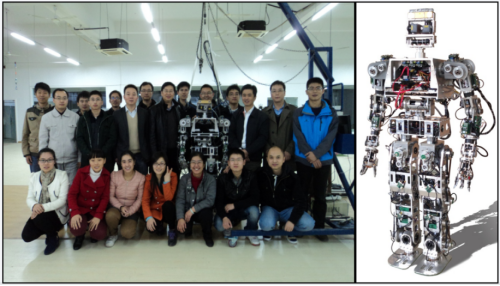 技術團隊與刑天機器人
技術團隊與刑天機器人刑天主體采用高強度鋁合金材料,能夠實現輕量化,提高產品功重比,將伺服控制元件、執行元件、多傳感檢測元件高度集成,減小體積。在極限范圍內進行測試,其關節驅動器單手最大抓取質量為 5 kg,這也是人形機器人必備的功能。
要做到高達34個自由度(關節)的人形機器人,機電硬件(主要是電機及其驅動器+減速機)、運動軟件算法的突破和迭代必不可少,下面我們展開講講刑天的“手-眼-足-腦”一體化關鍵技術。
▍動態平衡控制算法 實現雙足穩定性行走
要保持機器人行走的穩定性,其核心是要有動態穩定性,為了使機器人在動態行走時保持重心的穩定,零力矩點(ZMP)必須落在支撐面內,所以雙足機器人進行步態規劃時必須要在ZMP理論的前提下,合理地規劃踝關節和髖關節。
這就要求機器人腿部應具備適當的機械柔順性,從而有效緩解來自未知高剛度環境(地面、障礙物等)的碰撞沖擊,保護機身及其附帶電子設備,并有利于提高機器人運動穩定性。

技術團隊研制的刑天機器人
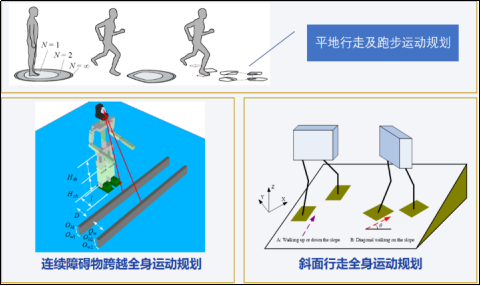
機器人步行動態穩定運動規劃
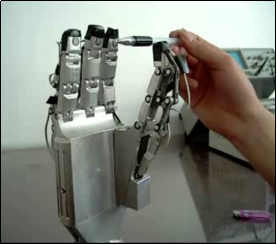
▍欠驅動多自由度手爪 實現自適應抓取
機器人手爪的關鍵在于:安全可靠性、自適應性和更高的智能性。安全可靠性研究確保整個機器人系統工作萬無一失,因此,要求其手爪結構和控制系統要簡單化。對于服務機器人手爪,需要提高通用性,使得手爪具備適應各種被抓物體形狀的能力。而手爪智能化研究可以提高手爪決策的準確性,減少出錯的可能性。
刑天機器人還擁有仿人形自適應手爪與柔性末端夾持技術。它的“左右手”均為3指結構,每個手指可以旋轉并抓握物體,單手最大抓取質量為5kg,采用欠驅動技術與柔性材料,能夠自動適應不同類型的工件和不同場景的應用。
這一核心科技,使其可以精確抓取和操作常見物體,在各種工業應用中大展身手,形象地說,裝了手爪的機器人功能跟人手類似,讓它搬磚塊還是耍大刀,就完全要看專業認知和技能了,它可以廣泛應用于諸如搬移、檢測、焊接、貼標、噴涂、組裝、鎖螺釘等多種工業流程和應用場景。
▍多傳感器信息融合 快速感知環境變化
如果說擁有了完整的軀干,還需要什么,那一雙“慧眼”在智能機器人時代就顯得尤為重要。刑天設計了一種結合雙目立體相機與激光掃描儀的環境感知系統,可以實現雙目圖像的自動配準與分割,并能對圖像中指定像素點的三維坐標進行測量,以實現仿人機器人所需的目標檢測、識別、定位等功能。
這使得其具有典型環境和常見物體感知識別能力,同時可以對行進路線進行自動規劃,能夠攀爬、自主避障、在崎嶇路面行走,適應各種地面環境。針對復雜的工作環境,刑天還可采用人工遙控操作、緊急情況處理等自主管理相結合的半自主控制方式。
刑天采用AI智能算法與高速控制芯片,提升嵌入式系統的響應速度,提高了重復定位精度;整體控制周期從 10 ms 縮短至 2 ms,自主化絕對值磁編碼器,有效位數17位。
研制基于3D視覺傳感器與智能相機的智能抓取策略,實現對雜亂無章的物料進行精準識別,實現機器人準確抓取,并開發出基于深度學習缺陷識別算法,可以說是“腦力擔當”。
刑天機器人曾在全世界100多個隊中,獲得參加美國國防部DARPA舉辦的國際機器人挑戰賽(DRC)資格,實現了整個機器人系統有機集成,突破環境識別、自主行走、任意抓取等多項關鍵技術。
▍鉆堅研微,百折不撓 刑天機器人的后續開發
江蘇省產業技術研究院智能制造技術研究所(集萃智造)在刑天機器人技術基礎上,繼續研制液壓四足機器人,突破微小型旋轉直驅伺服閥、恒轉矩高功重比驅動電機、微小型高速高壓軸向柱塞泵等核心部件研制的關鍵技術;開展高頻響伺服驅動非線性控制研究,實現剛度補償與高動態糾偏矯正;研究低液動力結構優化與球副抗磨損工藝,實現高功功率密度驅動系統,解決高功率密度驅動的“卡脖子技術”問題。
采用鈦合金與有機材料復合3D打印技術,進行耐瞬態高壓的仿血管流道設計,實現液壓能量的輕量化和集成化分布式傳輸;顯著提高足式機器人的爆發力、負載能力和越障能力。
液壓四足機器人
▍超10萬億市場“大蛋糕”等待分食
那么,在“機器換人”的趨勢下,人形機器人有著多大市場空間?
根據馬斯克 在 2022 年 4 月的 TED 演講,Optimus 的單價大約 2.5 萬美元 (約 16.75 萬元人民幣),有望進入家庭作業、快速配送、工業生產等各種消費級和商業級場景。到 2030 年,全球約有 4 億個工作崗位將被自動化機器人取代,按20%滲透率測算,全球人形機器人市場空間約 12-16 萬億元。
面對龐大的商業化“蛋糕”,巨頭紛紛開始行動,小米也發布了首款全尺寸人形仿生機器人——“CyberOne”, 成本約60-80萬人民幣。
國內同樣擁有龐大的市場空間。根據IFR和中國電子學會數據,盡管人形機器人處于起步階段,參照其他電子產品,滲透率超過20%后將爆發式增長。按23-30年CAGR 30%測算到2030年,我國人形機器人市場規模約為8700億元。
人形機器人是一項需要長期投入的復雜技術,在早期商業化程度不高的階段,想要打造一臺人形機器人,就意味著企業要具備一系列核心技術的研發能力,如伺服驅動器、機械傳動、運動規劃與控制、計算機視覺與感知、智能語音交互、SLAM與導航、人機交互和手眼協調等核心技術。
而短短兩三年的時間,刑天機器人能夠誕生,從工程技術上來說是非常硬核的,尤其是在突破了仿生機構設計、結構輕量化設計、多傳感信息感知與融合、人機交互實時控制和多學科系統集成等關鍵技術方面,能夠讓人眼前一亮。
刑天機器人在復雜環境下多任務作業、自主行走等功能方面處于國際先進水平,可以有效擴展人類的工作能力,是未來關注和發展的重點,我們相信在將來,人形機器人或許會得到數量級的提升。
排版 | 麥子
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。
全息投影相關文章:全息投影原理