LabVIEW控制Arduino實現超聲波測距(進階篇—5)

1
項目概述
超聲波測距是一種傳統而實用的非接觸測量方法,與激光、渦流和無線電測距方法相比,具有不受外界光及電磁場等因素影響的優點,在比較惡劣的環境中也具有一定的適應能力,且結構簡單、成本低,因此在工業控制、建筑測量、機器人定位方面有廣泛的應用。
本節將介紹使用HC-SR04超聲波傳感器、DS18B20數字溫度傳感器、ArduinoUno和LabVIEW組成帶有溫度補償的超聲波測距系統,可用于機器人避障等場合的距離測量。
超聲波測距的原理:從超聲波****發出的超聲波(假設傳播介質為氣體),經氣體介質的傳播,遇到障礙物之后反射的超聲波被超聲波接收器所接收。將超聲波****與接收之間的時間與氣體介質中的聲速相乘,就是聲波傳輸的距離,聲波傳輸距離的一半便是所測距離。
拓展學習:LabVIEW控制Arduino采集多路DS18B20溫度數值(進階篇—3)
2
項目架構
超聲波測距系統總體框圖如下圖所示:
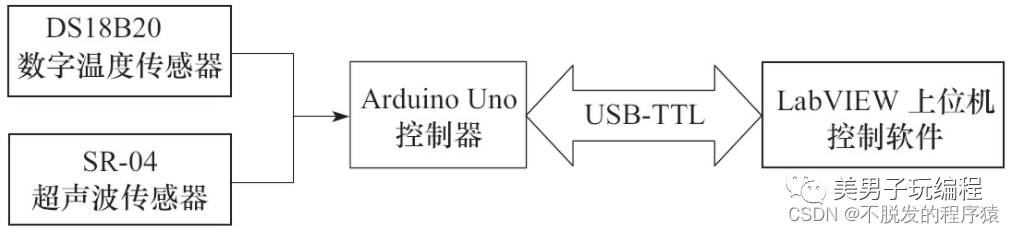
在整個系統中,Arduino Uno作為下位機,負責讀寫HC-SR04超聲波傳感器、讀取DS18B20溫度傳感器以及上傳數據,LabVIEW軟件作為上位機,負責接收超聲波時間、空氣溫度和計算超聲波所測量的距離值并顯示,上下位機利用USB-TTL接口實現通信。
3
硬件環境
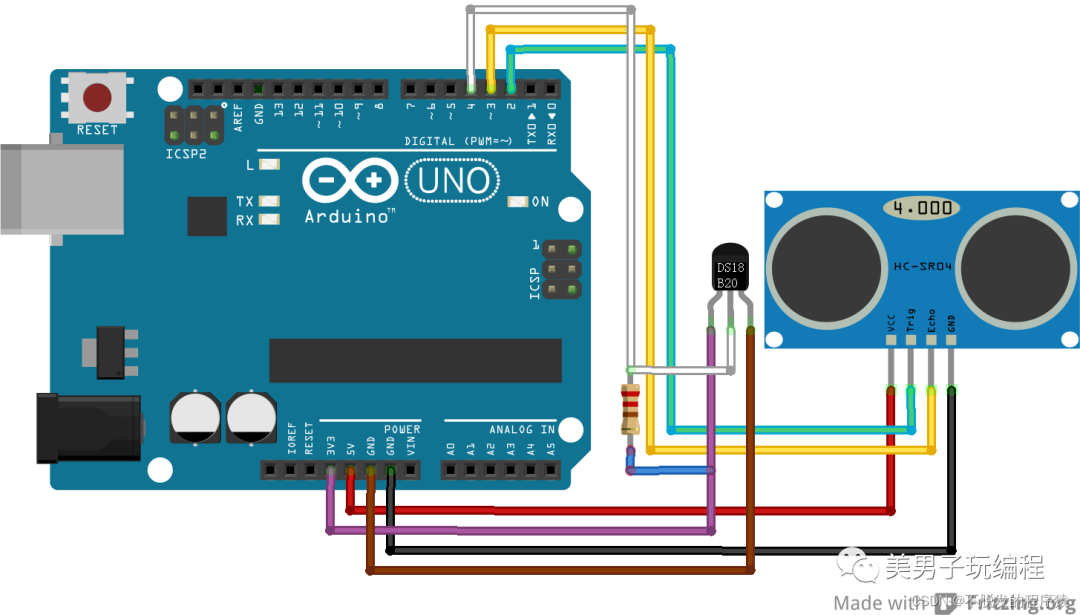
本項目將HC-SR04超聲波模塊的VCC、GND、Trig、Echo分別連接到ACCrduinoUno控制板的+5V、GND、數字端口D2和D3上。然后,將DS18B20溫度傳感器VCC、GND、DQ分別連接至Arduino Uno控制板的3.3V、GND和數字端口D4上,且在DQ與3.3V之間連接一個1KΩ的上拉電阻。超聲波測距系統硬件連接示意圖如下圖所示:
4
Arduino功能設計
在基于Arduino與LabVIEW的上下位機超聲波測距系統中,Arduino Uno控制板需要完成以下功能:接收和判斷命令、采集和傳輸溫度與超聲波往返時間。Arduino Uno控制板通過串口接收上位機發來的命令,分析得到有效命令,讀取DS18B20數字溫度傳感器,將氣溫數據上傳給LabVIEW軟件或控制超聲波傳感器****超聲波,并測量出超聲波往返的時間,將超聲波往返的時間上傳至LabVIEW軟件。
Arduino Uno控制器負責讀取LabVIEW上位機發來的距離測量和溫度采集命令,并通過HC-SR04超聲波傳感器和DS18B20傳感器獲取超聲波往返時間和溫度數據,通過串口發送回上位機LabVIEW軟件。Arduino Uno控制器的程序代碼如下所示:
#include <OneWire.h>#include <DallasTemperature.h> ? ???// Data wire is plugged into port 2 on the Arduino#define ONE_WIRE_BUS 2
// Setup a oneWire instance to communicate with any OneWire devices (not just Maxim/Dallas temperature ICs)OneWire oneWire(ONE_WIRE_BUS);
// Pass our oneWire reference to Dallas Temperature. DallasTemperature sensors(&oneWire);byte comdata[3]={0}; //定義數組數據,存放串口命令數據
int LED = 13; //定義LED連接的管腳const int TrigPin = 2;const int EchoPin = 3;float distance;
void receive_data(void); //接受串口數據void test_do_data(void); //測試串口數據是否正確,并更新數據
void setup(){ Serial.begin(9600); pinMode(LED, OUTPUT); // Start up the library sensors.begin(); } void loop(){ while (Serial.available() > 0) //不斷檢測串口是否有數據 { receive_data(); //接受串口數據 test_do_data(); //測試數據是否正確并更新數據 }}void distance_time(void){ digitalWrite(TrigPin, LOW); delayMicroseconds(2); digitalWrite(TrigPin, HIGH);//發送10μS的高電平觸發信號 delayMicroseconds(10); digitalWrite(TrigPin, LOW); distance = pulseIn(EchoPin, HIGH); // 檢測脈沖寬度,即為超聲波往返時間}
void receive_data(void) { int i ; for(i=0;i<3;i++) { comdata[i] =Serial.read(); //延時一會,讓串口緩存準備好下一個字節,不延時可能會導致數據丟失, delay(2); }}
void test_do_data(void){ if(comdata[0] == 0x55) //0x55和0xAA均為判斷是否為有效命令 { if(comdata[1] == 0xAA) { switch (comdata[2]) { case 0x01: sensors.requestTemperatures(); // Send the command to get temperatures Serial.print(sensors.getTempCByIndex(0)); break; case 0x02: distance_time(); Serial.print(distance) ; break ; } } }}5
LabVIEW功能設計
LabVIEW上位機部分需要完成以下功能:
1、向下位機Arduino控制器發送采集溫度的命令,Arduino控制器通過串口接收上位機命令,完成溫度的采集之后并將數據回傳,LabVIEW軟件將回傳的溫度數據顯示在前面板上。
2、向下位機Arduino控制器發送測量距離的命令,Arduino控制器通過串口接收上位機命令,完成距離的測量之后并將超聲波往返時回傳,LabVIEW軟件將回傳的超聲波往返時間、溫度與音速公式:u=331.3+(0.606 x t)m/s (t為攝氏溫度)計算得到所測量的距離,顯示在前面板上。
3、當處于自動測溫模式時,且LabVIEW軟件超時1秒時,向下位機Arduino控制器發送采集溫度的命令,并將回傳的溫度數據顯示在前面板上,實時更新溫度,以保證測距盡可能精確。
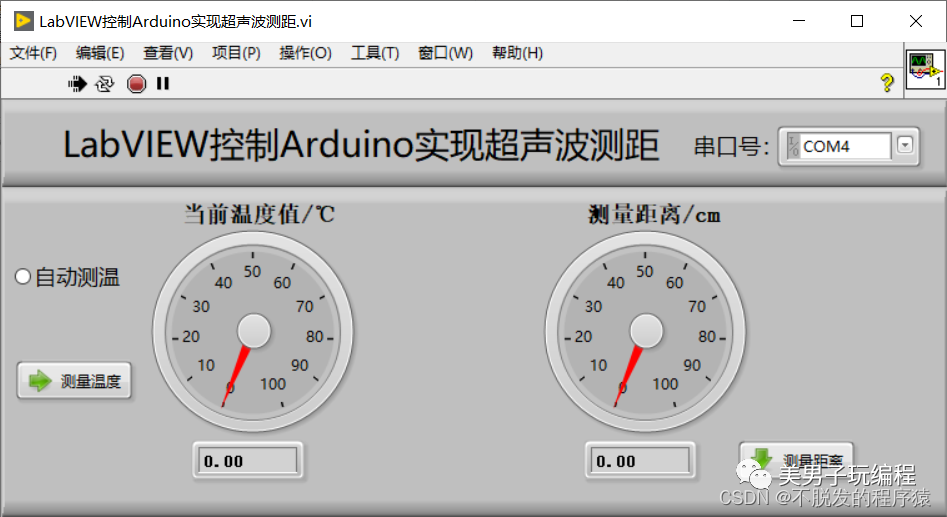
5.1、前面板設計
LabVIEW上位機前面板主要有當前溫度值和測量距離的顯示表盤,以及自動測量選框和手動測溫的按鈕,如下圖所示:
5.2、程序框圖設計
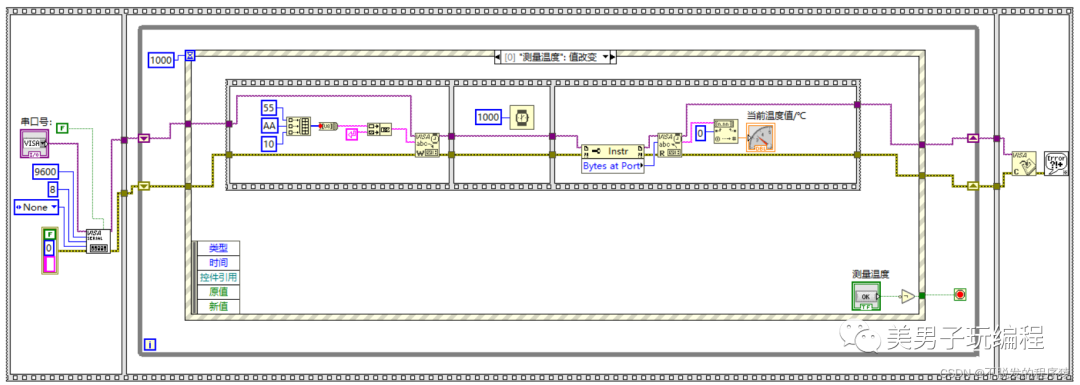
LabVIEW程序首先通過選擇的Arduino Uno控制器的串口號來初始化串口通信,然后進入內嵌事件結構的While循環中,當"溫度測量"按鈕被按下時,則向Arduino Uno控制器發送溫度測量的命令碼,等待1秒之后讀取Arduino Uno控制器返回的溫度數據并顯示出來。
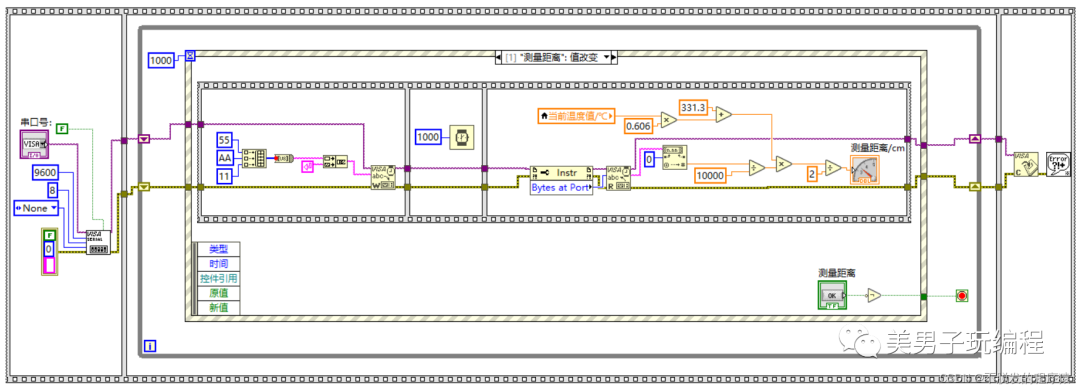
當“距離測量"按鈕被按下時,則向Arduino Uno控制器發送距離測量的命令碼,等待1秒之后讀取Arduino Uno控制器返回的超聲波往返時間,并通過溫度與音速公式u=331.3+(0.606 x t) m/s (t為攝氏溫度),計算得到所測量的距離數據顯示出來。
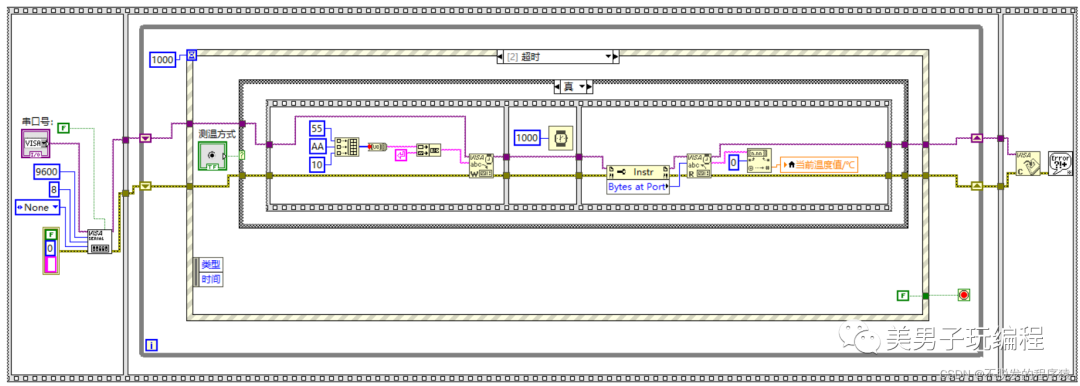
當“溫度測量"和“距離測量"按鈕在1秒內都沒被按下時,LabVIEW程序進入“超時”",且當自動測量選項被使能后,則向Arduino Uno控制器發送溫度測量的命令碼,等待1秒之后讀取Arduino Uno控制器返回的溫度數據并顯示出來,以實時更新當前的溫度。最后關閉串口通信。
LabVIEW上位機軟件中的“溫度測量”、“距離測量"和“超時"的程序框圖如下所示:
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。
數字濾波器相關文章:數字濾波器原理