- 1 概述 JPEG2000[1,2]是新的靜止圖像壓縮標準,它具有的多種特性使得它有著廣泛的應用前景。目前為止,JPEG2000的解決方案比較少,并且其中的絕大部分是軟件解決方案:Jasper[3]軟件是經IEC JTC1/SC29/WG1小組推薦
- 關鍵字:
IP 設計 編碼器 算術 Q-Coder 基于

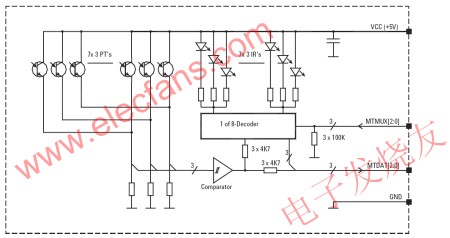
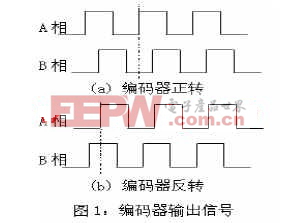
- 1.光電編碼器原理
根據檢測原理,編碼器可分為光學式、磁式、感應式和電容式。根據其刻度方法及信號輸出形式,可分為增量式、絕對式以及混合式三種。
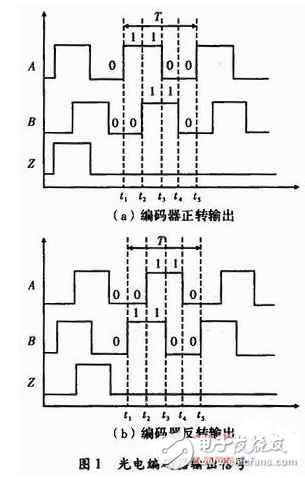
1.1增量式編碼器
增量式編碼器是直接利用光電轉換原理輸
- 關鍵字:
電路 應用 原理 編碼器 光電
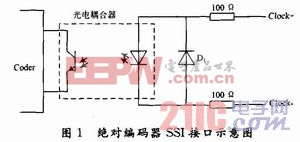
- 在跟蹤控制系統中,控制精度取決于控制信號的產生,控制信號是否受到數據采集的影響,基于絕對編碼器的數據采集系統,利用絕對編碼器的特點,可以方便靈活地控制數據信號的產生和傳輸,為提高控制系統的整體性能提供了有利的支持,提高了信號的抗干擾能力。
- 關鍵字:
數據采集 編碼器 絕對 基于
- 1 硬件平臺
1.1 ADSP-BF561處理器 Blackfin561是Blackfin系列中的一款高性能定點DSP視頻處理芯片。其主頻最高可達750MHz,其內核包含2個16位乘法器MAC、2個40位累加器ALU、4個8位視頻ALU,以及1個40位移位器
- 關鍵字:
編碼器 平臺 視頻 處理器 ADSP-BF561 基于
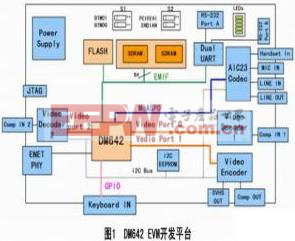
- H.264視頻編碼器在DSP上的實現與優化,摘要:在DM642 EVM平臺上實現了 H.264視頻編碼器,并從內存分配、Cache優化、代碼優化以及匯編程序級優化等幾個方面對編碼器進行了優化。實驗結果表明,優化后的編碼器能保持較高的圖象質量和壓縮效率,并具有較好的
- 關鍵字:
實現 優化 DSP 編碼器 視頻 H.264
- 基于MSP430F149單片機的光電編碼器位置檢測系統設計,在實際的工業位置控制領域中,為了提高控制精度,準確地對控制對象進行檢測是十分重要的。傳統的機械測量位移裝置已遠遠不能滿足現代生產的需要,而數字式傳感器光電編碼器,能將角位移量轉換為與之對應的電脈沖輸出,
- 關鍵字:
位置 檢測系統 設計 編碼器 光電 MSP430F149 單片機 基于
- 引言在侍服電機系統中,需要系統提供精確的位置控制和速度控制,同時要求響應快,速度高,轉動平滑,力矩穩定等。對于越來越高的系統要求,侍服電機的控制也是越來越復雜,系統的控制器、電機驅動、位置與速度傳感形
- 關鍵字:
電機 系統 應用 伺服 系列 光學 編碼器 AEDB-9340

- 現在的閥門大多為機電一體化設計,能通過電路系統對閥門進行自動化控制;電路系統實現對閥門開度的控制、反饋與調節,并做到精確無誤定位,其重點在于閥門位置的精確反饋和執行機械設計的運行,這也是機電一體化綜
- 關鍵字:
應用 控制 閥門 AEAT-84AD 編碼器
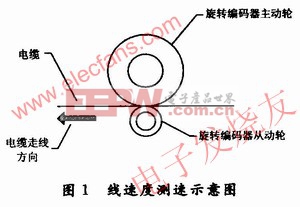
- O 引言 在電纜生產線上,通常需要檢測電纜的走線速度,用來控制收線電機的轉速和計算線纜的長度。成纜工藝參數的穩定,直接關系到電線電纜的質量。 該項目是為某電纜廠的技術改造項目,要改造的設備是利用束
- 關鍵字:
速度 控制系統 環線 編碼器 單片機 旋轉 基于
- H.264/AVC是ITU-T和ISO聯合發布的國際視頻壓縮標準[1],比特壓縮率分別是MPEG-4、H.263及MPEG-2的39%、49...
- 關鍵字:
H.264 AVC CAVLC 編碼器
- 摘要:隨著集成電路技術的發展,FPGA以其體積小、速度快、功耗低、設計靈活、利于系統集成、擴展升級等優點,被廣泛地應用于高速數字信號傳輸及數據處理。EnDat數據接口是適用于編碼器的雙向數字接口。EnDat可傳輸編
- 關鍵字:
EnDat FPGA 編碼器 數據采集

- 基于Max+PlusⅡ平臺的CMI編碼器的設計方案,0 引言 CMI碼是傳號反轉碼的簡稱,它是一種應用于PCM四次群和光纖傳輸系統中的常用線路碼型,具有碼變換設備簡單、有較多的電平躍變,含有豐富的定時信息,便于時鐘提取,有一定的糾錯能力等優點。 在高次脈沖
- 關鍵字:
編碼器 設計 方案 CMI 平臺 Max Plus 基于
ndi?編碼器介紹
您好,目前還沒有人創建詞條ndi?編碼器!
歡迎您創建該詞條,闡述對ndi?編碼器的理解,并與今后在此搜索ndi?編碼器的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473