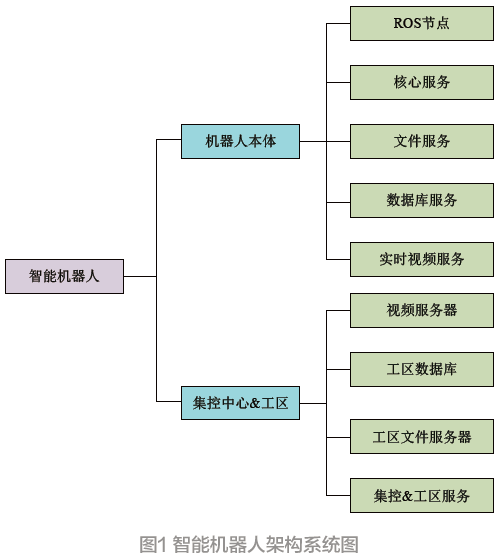
- 為了解決傳統變電站倒閘操作及巡檢業務效率低下、帶電作業危險性較大的問題,本文將人工智能技術和機器人技術結合,利用基于Mean Shift的目標跟蹤算法,通過多軸機械手、浮動操作平臺、3D視覺相機等手段將人工運維的大部分操作集成至智能機器人上,實現了遠程倒閘操作、智能巡檢、突發情況緊急分閘等功能,并成功應用于220 kV、110 kV電壓等級變電站以及10 kV開關室中,大幅度提升了作業效率,降低人力成本,減少安全風險,推動變電站智能化建設。
- 關鍵字:
智能機器人 巡檢機器人 操作機器人 變電站 圖像識別 視覺定位 202205
- IS5403-11具有工件定位功能。使用IS5403-11找到產品,并計算出產品的坐標信息(橫坐標、縱坐標、偏轉角度),視覺系統將產品的坐標信息(橫坐標偏移量、縱坐標偏移量、偏轉角度)通過以太網傳送給機器人, 機器人根據傳
- 關鍵字:
Cognex 視覺定位 重力對中 嵌入式
- 針對移動機器人的局部視覺定位問題進行了研究。首先通過移動機器人視覺定位與目標跟蹤系統求出目標質心特征...
- 關鍵字:
機器人 目標跟蹤 視覺定位
視覺定位介紹
您好,目前還沒有人創建詞條視覺定位!
歡迎您創建該詞條,闡述對視覺定位的理解,并與今后在此搜索視覺定位的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473