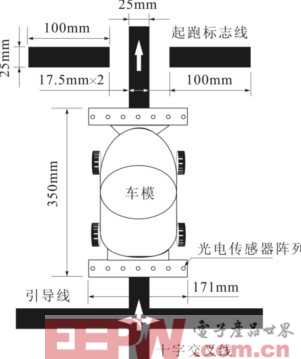
- 由于智能車模要在黑色引導線的識別過程中跑完全程,所以采用的尋線傳感器主要是光學傳感器。為了實現車模的記憶路況算法,首先要求車模系統能夠識別起跑線,并區別于十字交叉線,本文介紹了車模系統識別起跑線的紅外光電傳感器的布局模型和設計。
- 關鍵字:
飛思卡爾 智能車 紅外光電傳感器 巡線算法 起跑線 引導線
巡線算法介紹
您好,目前還沒有人創建詞條巡線算法!
歡迎您創建該詞條,闡述對巡線算法的理解,并與今后在此搜索巡線算法的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473