經濟高效的矢量控制驅動(上)

要把電流分解為生成磁通的部分和生成扭矩的部分(isd、isq),我們需要知道電機磁通的位置。這需要與轉子連接的速度或位置傳感器傳感準確的速度信息。增量編碼器或解析器被作為矢量控制驅動的位置傳導器使用。在成本敏感的應用中(如洗衣機),測速發電機被廣泛采用。然而在有些應用中,并不需要使用速度/位置傳感器。目的并不是直接測量速度/位置,而是采用某些間接方法,估算轉子位置。那些沒有采用速度傳感器的算法被稱為“無傳感器控制”。
本文引用地址:http://www.j9360.com/article/93432.htm矢量控制算法描述
已實施的控制算法的概述框圖請見圖3。與其他面向矢量控制的方法一樣,它能夠分別控制感應電機的勵磁和扭矩。控制的目的是為了調節電機速度,速度命令值由高級控制進行設置。該算法在兩條控制回路中實施,快速內部控制回路實施采用125 μs周期,慢速外部控制回路的實施采用1毫秒周期。
為了實現感應電機控制,該算法使用一組饋入信號。基本饋入信號是DC總線電壓、三相定子電流,它們是從DC總線電流和電機速度重構而來。為了實現正確操作,控制結構要求電機軸上有速度傳感器。在提供算法的情況下,使用增量編碼器。
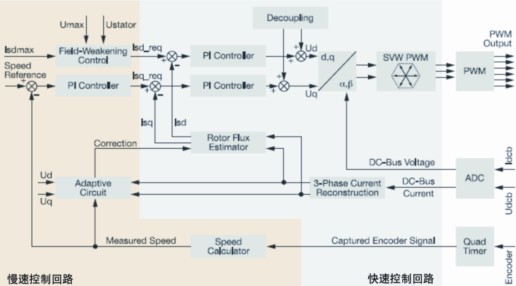
圖3 控制算法框圖
快速控制回路實施兩個獨立電流控制回路,它們是直軸和正交軸電流(isd、isq)PI控制器。直軸電流(isd)用于控制轉子磁通,正交軸電流(isq)對應電機扭矩。電流PI控制器的輸出用去藕定子電壓的相應d和q軸部分進行匯總,這樣我們就獲得了應用于電機的定子電壓的理想空間矢量。快速控制回路執行所有必要任務,支持定子電流部分的獨立控制。這些功能模塊包括:
- 三相電流重構;
- 前向Clark轉換;
- 前向和后向Park轉換;
- 轉子磁化通量位置估算;
- DC總線電壓波動消除;
- 空間矢量調制(SVM)。
慢速控制回路執行速度和磁場弱化控制器和低優先級控制任務。PI速度控制器輸出為生成定子電流的正交軸分量(isq)的扭矩設置參考。生成定子電流的直軸分量(isd)的磁通參考由磁場弱化控制器設置。自適應電路糾正轉子時間常量,最大限度地減少轉子磁通位置估算的錯誤。









評論