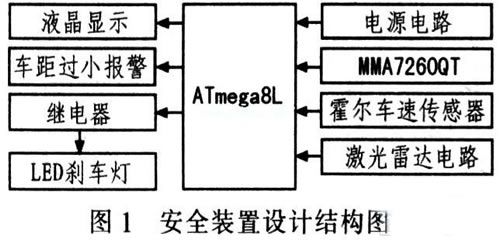
基于ATmega8L的新型防汽車追尾安全裝置設計

2.3 霍爾車速傳感器
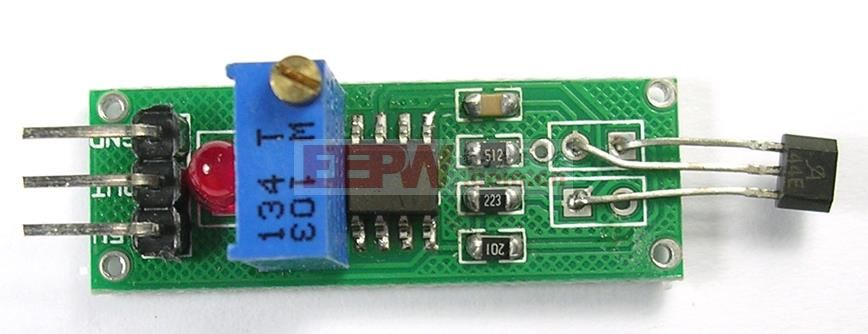
本文引用地址:http://www.j9360.com/article/268652.htm霍爾車速傳感器由8級磁鋼、UGN-3030T型霍爾開關傳感器、LM2917及放大電路組成,如圖4所示。
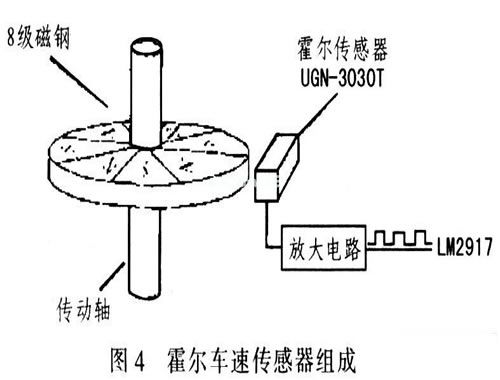
圖4中,汽車傳動部分帶動8級磁鋼旋轉,由于磁場變化使得8級磁鋼每轉一圈霍爾傳感器便產生8個脈沖信號,經放大器處理輸出到頻率/電壓轉換器LM2917,由單片機的A/D轉換器根據LM2917輸出電壓測量當前汽車時速。
2.4 激光雷達測距
測距方法主要有超聲波、激光雷達、連續波雷達等,基于成本和設計需求考慮,激光雷達測距是最佳選擇。激光雷達測距有連續波和脈沖波兩種方式,本設計使用脈沖波方式。安全裝置發出脈沖狀的紅外激光束照射前方,并利用汽車后部可反光部件(以汽車號碼牌為主)的反射光,通過受光裝置檢測反射光,單片機根據時間差計算出其距離。
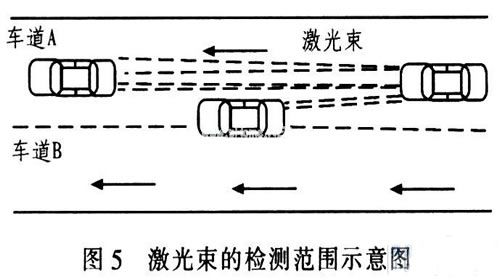
該部分電路由發光部、受光部、信號調理電路等組成,最終輸出信號由系統單片機處理。由于激光雷達發射光束集中,采用單一發射方式無法有效檢測前方一定距離,故在汽車前方安裝3個激光雷達測距模塊,如果其中一個模塊檢測到的距離小于該時刻最小允許距離,安全裝置將報警,即能夠及時檢測到插入車流的車輛并警報,如圖5所示。

低通濾波器相關文章:低通濾波器原理

評論