基于PSoC4的BLDC電機控制系統的設計與實現

對比基于PSoC4的控制方案和當前市場上的主流商用方案我們不難發現,PSoC4由于集成了豐富的片內模擬和數字資源,可以完全用片內的硬件來完成無刷直流電機的順序換相和電流監控,比軟件實現更加快速可靠,且節省了可觀的片外有源器件的成本。此外,片內的UDB還可以直接檢測霍爾傳感器的失效狀態,并迅速保護電機,這也是其它廠商所不具備的重要功能。
本文引用地址:http://www.j9360.com/article/264460.htm5. 基于PSoC4 的無刷直流電機控制系統設計
① 控制原理圖設計
依據圖4的控制框圖,我們設計了圖5所示的在PSoC Creator環境下的BLDC電機控制原理圖。
霍爾信號經I/O引腳后直接輸入UDB換相邏輯表LUT_Cmut直接驅動三相全橋電路,完成電機的硬件換相。同時霍爾信號也同步輸入另一個UDB邏輯表LUT_Spd,實現霍爾傳感器的失效狀態檢測并完成電機的速度檢測。
電機電流經采樣電路后輸入片內運放Opamp_1,經運放和濾波后輸入片內比較器,與片內IDAC產生的過流閾值基準進行比較,反轉后將直接關斷PWM輸出,通過換相邏輯表LUT_Cmut來使電機斷電。
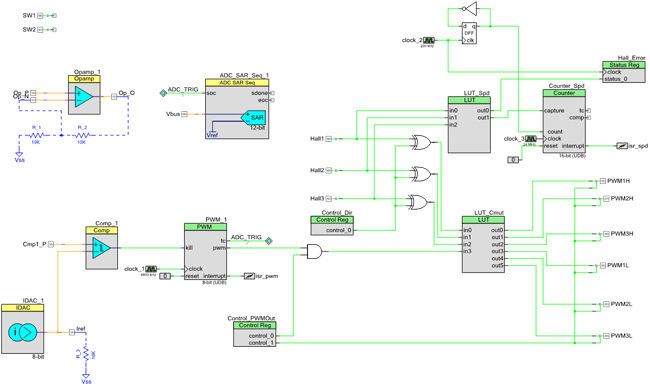
圖5:步進電機控制原理圖
② 控制系統軟件設計
由于采用了PSoC4片內硬件進行換相、霍爾失效檢測和過流檢測保護,因此系統的的軟件設計較為簡捷,只需讀取用戶命令和完成速度閉環調節等即可。圖6為控制系統主程序流程框圖。
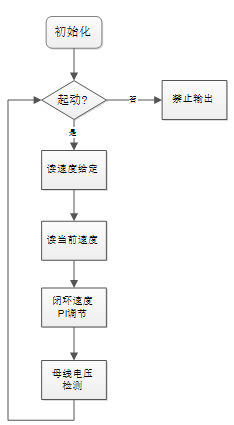
圖6:主程序流程圖
控制主程序首先初始化和配置PSoC4的內部資源,在主循環中首先檢測用戶的起停命令和速度給定,在執行速度閉環PI調節。最后檢測母線電壓狀態。
③ 控制系統實驗結果
完成系統前述的系統原理圖和程序設計后,在PSoC Creator環境下編譯BLDC電機控制工程,并連接PSoC4開發板,三相全橋驅動板與BLDC電機,通電后電機可正常運行。圖7顯示電機運行在4000RPM時的霍爾信號與三相繞組反電動勢波形。通道1,2,3分別為相繞組A,B,C反電動勢波形。
由圖可以看出,BLDC電機運行穩定,反電動勢為標準的梯形波。

圖7: 三相霍爾信號與繞組反電動勢波形
6. 小結
本文主要介紹了如何在Cypress推出的PSoC家族的最新成員PSoC4平臺上開發有傳感器BLDC電機控制系統。本文的設計過程說明,PSoC4片內集成的豐富資源使BLDC電機的換相和霍爾失效檢測都可以由內部硬件來完成,簡化了控制系統的軟件設計并提高了可靠性。此外,片內集成的運放和比較器將電流檢測和保護也放在芯片內部完成,使過流檢測反應速度更快并進一步降低了成本。因此,用戶可以使用PSoC4設計出具有優異性能和較低價格的有傳感器BLDC電機控制系統和產品。

霍爾傳感器相關文章:霍爾傳感器工作原理
電流變送器相關文章:電流變送器原理 霍爾傳感器相關文章:霍爾傳感器原理




評論