實用案例:嵌入式采煤工作面安全集中監控系統

3.4.2信號處理模塊的軟件設計流程
根據信號的特征和信號處理的方式,這一模塊的實現主要可以分為兩大部分:第一部分為對傳感器傳來信號的處理,它們的信號處理流程相似,我們一瓦斯信號的處理流程做例進行詳解;第二部分為圖像信號處理模塊,不同于前面所提到的信號的處理方式,其設計到圖像采集和壓縮等問題,因此我們將其實現流程單獨講解。
3.4.2.1非圖像信號處理軟件設計
(1)PID算法介紹
為了將瓦斯濃度維持在一個正常的水平,要求系統能夠接受地面控制中心的控制參數對通風電機進行控制,同時為了體現靈活性,要求系統在平時能夠自我調控,減少人的工作量。本次設計選用PID控制器實現平時系統的自我調節。系統能夠根據瓦斯的濃度自動調節通風電機的轉速,同時又能保證在緊急時刻將控制權交給地面控制中心。PID算法控制原理如圖3.4.2.1-1所示:
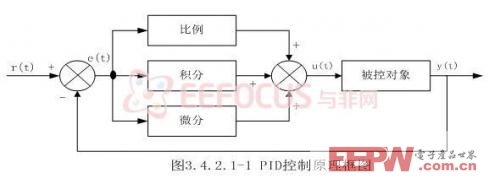
PID是比例、積分、微分的縮寫,將偏差的比例(P)、積分(I)和微分(D)通過線性組合構成控制量,用這一控制量對被控對象進行控制,這樣的控制器就稱為PID控制器。本次設計之所以選擇PID控制器,主要是考慮到PID具有以下優點:技術成熟、易被人們熟悉和掌握、不需要建立數學模型、控制效果好。
如圖3.4.2.1-1所示,該系統有模擬PID控制器和被控對象組成。圖中,r(t)是給定值,y(t)是系統的實際輸出值,給定值與實際輸出值構成控制偏差e(t),有e(t)=r(t)-y(t)。e(t)作為PID控制器的輸入,u(t)作為控制器的輸出和被控對象的輸入。
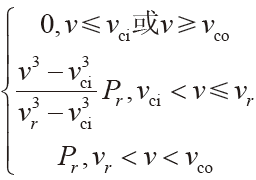
模擬PID控制器的控制規律為:
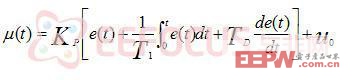
式3.4.2.1
其中:y(t) ——調節器的輸出信號;
e(t) ——調節器的偏差信號,它等于給定值與測量值之差;
KP ——調節器的比例系數;
TI ——調節器的積分時間;
TD——調節器的微分時間。
在式3.4.2.1中,比例環節的作用是對偏差瞬間做出快速反應。偏差一旦產生,控制器立即產生控制作用,使控制量向減少偏差的方向變化。積分環節的作用是把偏差的積累作為輸出。在控制的過程中,只要有偏差存在,積分環節的輸出就會不斷增大。直到偏差e(t)=0,輸出的u(t)才可能維持在某一常量,是系統在給定值r(t)不變的條件下趨于穩態。微分環節的作用是組織偏差的變化。它是根據偏差的變化趨勢(變化速度)進行控制。偏差變化的越快,微分控制器的輸出就越大,并能在偏差值變化之前進行修正。微分作用的引入,將有助于減少超調量,克服震蕩,使系統趨于穩定。
(2)瓦斯控制模塊程序流程
瓦斯控制模塊的流程如如圖3.4.2.1-2所示:
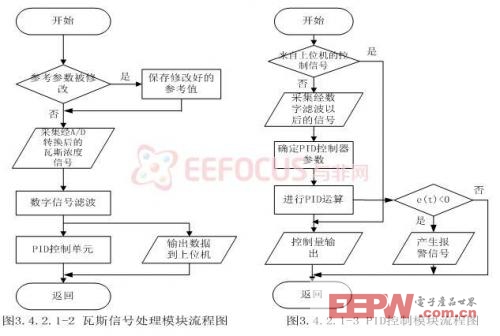
本程序在采樣時刻到達以時,才會打開相關信號通道,在本模塊中先采集瓦斯濃度信號,然后程序運行。







評論