一種氣動人工肌肉運動位移測量系統的實現

0 引言
氣動人工肌肉也稱氣動人工肌肉驅動器(Pneumatic Musecle Actuator,PMA),其研究始于20世紀50代,近幾年,在國內也得到了廣泛的研究與應用。氣動人工肌肉響應快、可靠性高,同時擁有柔性而且輕盈,這使得它對人類來說,比其他的驅動器更安全。隨著機器人技術的發展需求,氣動人工肌肉得到了廣泛的研究。目前人工肌肉運動位移的測量主要通過在肌肉末端連接一個滑動變阻器,再通過檢測變阻器兩端的電壓來完成,但是這種方法要求有高精度的變阻器,同時,這種方法對人工肌肉的運動也會造成一定的影響,所以,實驗結果往往不很理想。本文在虛擬儀器平臺下,采用視覺跟蹤與圖像處理方法,來完成對目標位移的測量。
1 硬件結構設計
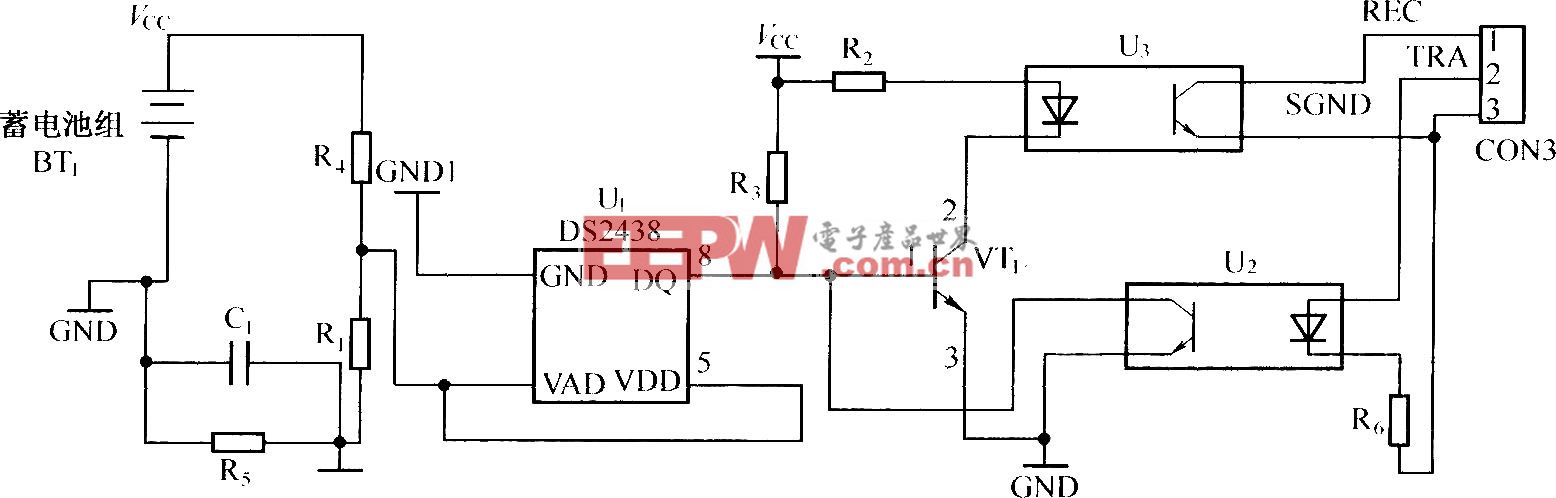
本系統采用的是千兆網卡,Basler SCA640-70GM,659X490,70 FPS千兆網絡攝像頭,而且NI的PCIE-8235內嵌有幀接收器,因而極大地降低了圖像采集對CPU的占用率。利用網線直接將采集到的圖像傳到PC機,同時也簡化了系統硬件結構的設計。圖1所示為系統的硬件結構圖。

2 軟件設計
本系統軟件采用NI公司的虛擬儀器軟件NILabVIEW 8.6和視覺處理工具包NI Vision8.6。通過LabVIEW圖形化的編程環境,編程者可以象搭積木一樣搭建程序和用戶界面,而程序的執行內容由一個一個可表示函數的圖標和圖標之間的數據流連線構成,這可使得編寫和調試程序變得生動、便捷。NI Vision是和LabVIEW無縫鏈接的,NI Vision里包含了目前圖像處理和機器視覺比較成熟的Vis,同時有用于圖像采集的驅動Vis,可在最大程度上簡化圖像采集、處理和輸出結果的過程。
2.1 圖像采集模塊
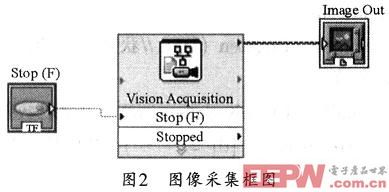
跟其它NI板卡數據采集一樣,本系統的圖像采集可借助于采集助手NI Vsion Acquisition來完成圖像的快速采集,其程序框圖如圖2所示。
2.2 圖像刻度轉換
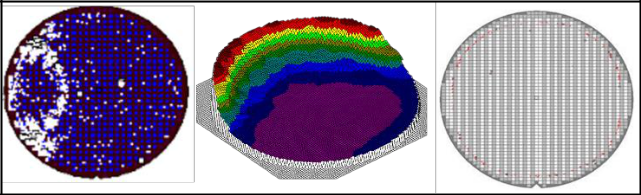
直接從圖像中測得的坐標、面積、距離等參數都是用像素值表示的,而實際上,還要根據需要將像素值轉換成設計需要的值。本設計要測出人工肌肉伸縮的長度,單位是毫米(mm),在長度測量的過程中,可將一張打印有實際刻度的紙作為氣動人工肌肉的背景,這樣既可以分析背景對圖像處理的影響,又可以作為測量的輔助工具。圖3所示是其圖像刻度轉換指示圖,圖中,可取0mm和50mm的圖像坐標分別為(1126.000,641.000)和(1510.000,641.000),這樣,其像素長度為384.000pixel對應實際的50mm,在此基礎上,其伸縮長度單位轉換都將以此為標準在程序中自動進行。










評論