GPS接收機中鎖頻環頻率誤鎖的檢測

摘 要:為了解決全球定位系統(GPS)接收機中的鎖頻環在載波同步過程中可能出現的頻率誤鎖問題,在分析了鎖頻環在噪聲環境下的工作原理及產生頻率誤鎖原因的基礎上基于有無發生頻率誤鎖時同一信息符號對應的多個預檢測積分值的變化規律,提出了一種用于頻率誤鎖檢測和快速糾正的算法。仿真結果表明:該方法能夠在鎖頻環完成工作之后及時判決是否有誤鎖發生,誤鎖時可在1~2個導航比特時間內把載波頻率調整到正確頻率上。該方法實現簡單,可有效消除頻率誤鎖給信號同步時間帶來的影響。
關鍵詞:全球定位系統(GPS)接收機;自動鎖頻環;鑒頻器;誤鎖;預檢測積分
載波的恢復與跟蹤是對全球定位系統(GPS)C/A(coarse/acquisition)碼信號進行相干解調的關鍵。通過捕獲過程中偽碼相位和載波頻率的二維搜索,可獲得載波頻率的粗略估值,對載波相位的精確跟蹤需采用鎖相環實現。鎖相環工作的頻率動態范圍很小,而捕獲過程獲得的載波頻率估值仍存在較大的不確定度,故需先把載波頻率牽引至鎖相環的線性工作范圍之內。一般可采用鎖頻環完成對載波頻率的這一牽引過程。
接收機算法中,預檢測積分時間的選擇受到鑒頻范圍和信號信噪比的限制。GPS接收機中一般選用一個C/A碼周期(1 ms)作為預檢測積分時間,此時鑒頻范圍為250 Hz。為保證偽碼捕獲正常工作,預檢測積分時間為1 ms時,捕獲過程的最大頻率間隔為667Hz;為盡可能快地捕獲,捕獲過程的頻率間隔一般取得盡可能大,但不能超過鑒頻范圍,可取為500 Hz,此時捕獲后的頻率不確定度正好對應鑒頻器的線性工作范圍。若Doppler頻偏落在線性鑒頻區域的邊界附近,受噪聲的影響,跟蹤頻率可能越過線性鑒頻區域,最終鎖定在一個錯誤的頻率上,造成誤鎖現象。如不能及時發現誤鎖,將會大大增加信號的同步時間。目前尚未在相關文獻上見到如何解決這一誤鎖現象的方案。
本文分析了GPS接收機中鎖頻環的頻率誤鎖現象,在此基礎上提出了一種進行誤鎖判決,并在發生誤鎖的情況下把載波頻率迅速調整到正確頻率上的算法,最后通過仿真證明了本文的結論。
l 信號模型
GPS的C/A碼信號是二進制相移鍵控(BPSK)調制的直接序列擴頻信號(DSSS)。對正交下變頻得到的兩路基帶信號分別進行相關累積,得到預檢測積分結果:
其中:tk=tk-1+T1,T1為預檢測積分時間,選為一個C/A碼周期;A為信號幅值;dk以為積分周期內信息比特的符號;△ω為接收信號載波與本地載波間的頻率差,φ為接收信號載波與本地載波間的初始相差;ni(k)、nq(k)為噪聲項。
鑒頻器使用正交兩支路相鄰兩時刻預檢測積分值的叉積值估計頻差,使用其點積值的正負消除信息比特符號翻轉的影響。鑒頻器輸出如下:
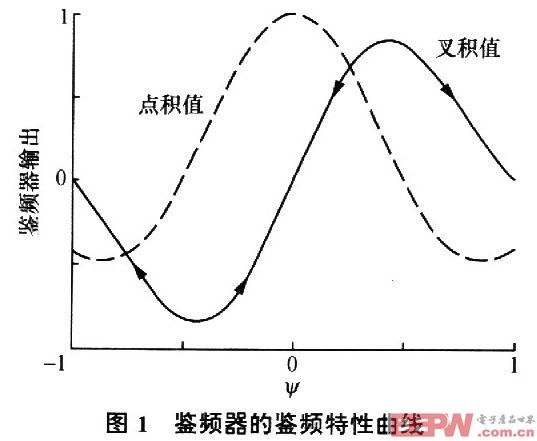
圖1為鑒頻器鑒頻特性曲線(其中ψ=△ωT1/π)。頻差估值經環路濾波器反饋回本地載波NCO(number controloscillator),逐漸消除本地載波與接收信號載波間頻差,完成頻率牽引過程。
完成頻率牽引之后鑒相器開始工作,鑒相器輸出信號的表達式為
其中N3(k)為噪聲項。鑒相器輸出相差估值控制本地載波NCO,調整本地載波相位,跟蹤輸入信號載波相位的變化。
鎖相環鎖定判決器用于判定環路是否完成對載波相位的鎖定,其輸出為
其中N4(k)為噪聲項,鎖相環鎖定時,相差趨于零,判決器輸出趨于1。
2 鑒頻器環路頻率誤鎖現象分析
不考慮噪聲的情況下,參照鑒頻特性曲線,分析鑒頻器工作的原理及產生誤鎖現象的原因。
當O|△ωT1|<π/2時,有正(負)的頻偏,鑒頻器輸出也為正(負)值,通過負反饋調整本地頻率,可使頻偏減小,鑒頻器輸出將逐漸收斂到原點(0,0),即頻偏為零的狀態。
當π/2|△ωT1|<π時,有正(負)的頻偏,但鑒頻器的輸出為負(正)值,經過負反饋調整本地載波頻率值,頻偏反而會繼續增大,鑒頻器的輸出將逐漸收斂到點(1,O)(-1,0)),之后鑒頻器輸出值為零,即頻率鎖定在使得△ωT1=π的狀態點上,有一個固定的頻率偏差△ω=π/T1,出現了誤鎖的情況。
有噪聲情況下,考察(2)式中的點積項(IkIk-1+QkQk-1)。當頻偏越接近線性鑒頻區域邊界時(|△ωT1|約等于π),余弦項的值越小,噪聲項N2(k)對點積項的正負符號就具有越大的影響力。這樣點積項的符號就不再能夠正確反映dkdk-1的符號,估計的頻偏值就可能與實際的頻偏值正負相反,控制載波NCO向相反的方向調整,以至頻率差值進一步增大。頻偏值一旦超過線性鑒頻范圍,點積項符號與dkdk-1符號相反的概率也進一步增大,頻偏不斷向相反的方向調整,導致鑒頻器逐漸收斂到誤鎖頻率點上。
鑒相器并不能發現并糾正這一誤鎖現象。誤鎖時,本地載波與接收信號的載波間有一固定的頻偏△ω0=π/T1及噪聲造成的微小頻偏△ω。此時鑒相器的輸出為
其中:tk-1=(k一1)T1,φs為輸入信號載波與本地恢復載波的相位差。當鑒相器趨于穩定時,φs收斂于π/2,兩載波間存在固定的相差。根據鎖相環的特性,固定的相差干π/2正好對應輸出固定的角頻率偏差π/T1,鎖相環仍將鎖定在誤鎖頻率點上。
考察誤鎖時鎖相環鎖定判決器的輸出
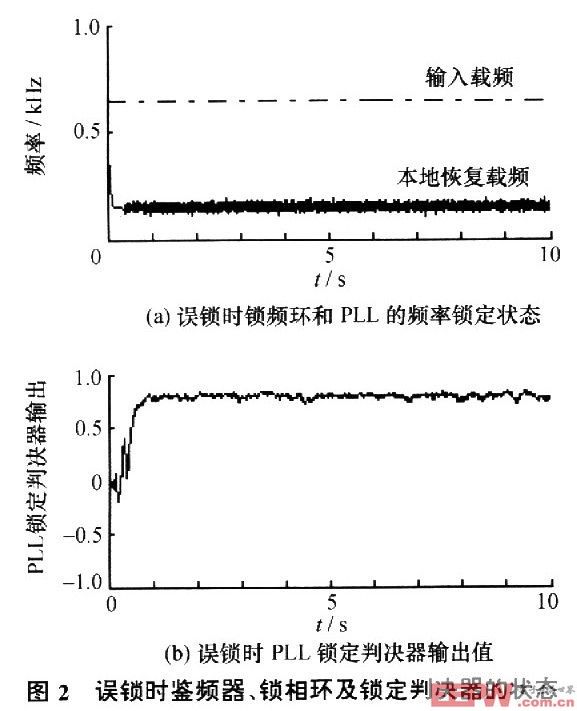
頻率偏差帶來的相位項為π/2,而穩態相差為π/2,二者之和為0,Va(k)仍是接近于1的值,鎖定判決器無法分辨出鎖相環是鎖定在誤鎖頻率上還是鎖定在正確頻率上。
圖2為誤鎖時鑒頻器及鎖相環的工作狀態。
3 鑒頻器誤鎖判決算法
考察式(1)中Ⅰ支路的預檢測積分值。誤鎖情況下,本地載波與接收信號載波間存在固定頻偏△ω=π/T1;同時本地載波與接收信號載波間還存在著固定相差φ=π/2。此時Ⅰ支路預檢測積分值為
其中tk-1=(k一1)T1。可見,Ⅰ支路預檢測積分值Ik的正負隨著(一1)k-1dk的變化而變化。圖3是發生誤鎖時的Ⅰ支路預檢測積分輸出以及正確跟蹤到載波頻率時的預檢測積分輸出對比圖。
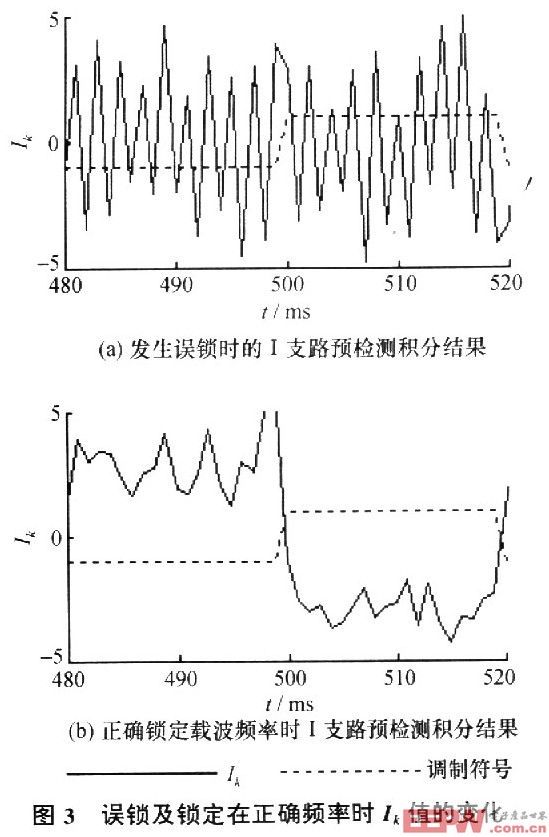
對于GPS衛星信號,一個調制符號周期內包含有20個C/A碼周期。在預檢測積分時間選為一個偽碼周期的情況下,連續輸出的20個預檢測積分值均對應同一個調制符號。那么在沒有發生誤鎖的情況下,連續輸出的20個Ik值的正負均相同;而在誤鎖情況下,對應同一調制符號的20個Ik值的正負將隨著(一1)k項交替變化,將會出現預檢測積分值正負符號的連續翻轉。據此可以得到鎖頻環誤鎖判決算法:
暫不考慮噪聲的影響,鎖定判決器指示鎖相環已完成相位鎖定之后,即開始累計連續20個Ik值的正負翻轉次數,無誤鎖時應該是連續20個Ik值正負符號均相同,誤鎖時應該是Ik值正負符號交替變化,共發生19次翻轉。
考慮噪聲的影響,在進行BPSK解調時會有一定的解調誤碼,即Ik的正負符號會受噪聲影響而出現錯誤,這將會影響到誤鎖時Ik正負翻轉的次數。設解調符號Ik的誤碼率為Pe。如果設定20個Ik值中發生17次正負符號翻轉即隊為發生了誤鎖,那么,經分析可得到誤鎖檢測概率為(n表示20個Ie值中正負符號翻轉的次數)
也即漏報概率是Pe的二階無窮小,可見閾值選為17即可獲得相當好的檢測性能。此時,在沒有誤鎖的情況下,需要在20個Ik值中至少發生8個誤碼,才可能誤判為發生了誤鎖,即虛警概率是Pe的8階無窮小。
發現誤鎖之后,通常可以重新啟動信號同步算法,再次經過鑒頻器實現頻率牽引,直




評論