基于MSP430的水聲遙控發射系統設計

3 D類功放電路
本文引用地址:http://www.j9360.com/article/247321.htm由MSP430F169直接產生的信號的功率很小,信號需要經功率放大后發出去,以保證能夠傳輸足夠遠的距離,這就離不開功率放大器。
功放電路設計采用LM353對信號經行放大和反相,通過比較器LF395進行信號進行比較產生方波驅動功放管,同時對導通時間進行控制,避免了兩只功率管同時導通燒毀電路的情況出現。對于功率的放大選用VMOS管IRFP250來完成,用變壓器完成功率的合成及電路匹配。
4 系統的軟件實現
4.1 編碼設計
海洋中存在的眾多不定因素使水聲信道變得異常復雜。隨機起伏的海面與地況不明的海底;海水中存在的大量的魚群、浮游生物、氣泡層、渦流、層流、不同溫度的水團;隨著溫度、鹽度、深度等不斷變化的聲波傳播速度;各種風雨、波浪、生物與傳播噪聲等均對聲波在海水中的傳播有巨大影響,因此,對于水下聲信號的傳播的研究面臨巨大的困難。
水聲遙控信號在水中傳播,受到水聲信道特性的影響,會產生一定的干擾,甚至會出現信號畸變,為了解決這一問題,接合水聲信道的特性,常用的兩種非相干的信號調制方式頻移鍵控(FSK)、多進制數字頻率調制(MFSK)。MFSK是FSK的多進制調制方式,與FSK相比它有較高的傳信率,適用于高速傳輸的系統,但是其信道利用率降低。本次設計采用MFSK調制方式進行編碼,但是為了降低干擾,抵抗水聲信道的多途效應,在信號之間添加了一定的碼元保護時間,很方便有效地解決了這一問題。
對于本次設計,要求系統工作頻率為25~35 kHz,脈沖寬度為1 ms,脈沖間隔為100 ms,在工作頻率范圍內選擇3個不同的頻率進行編碼。
編碼規則如下:
1)選用3個頻率的正弦波信號f1=26 kHz,f2=30 kHz,f3=34 kHz,一種頻率在一個指令碼中只出現一次,以便于多種情況下準確識別碼元的填充頻率,降低誤碼率,通過不同頻率的碼元的順序來分辨不同的信號;
2)單個碼元持續時間為1ms,碼元間隔為100 ms;
3)對于3個頻率的編碼信號,每次只要發射兩個填充不同頻率的碼元即完成信號的識別。
遙控分系統的工作頻率分別為:f1=26 kHz,f2=30 kHz,f3=34 kHz
當航模的運動速度為v時,接收到的信號的多普勒頻移最大為:
當航模的運動速度為5 m/s是,多普勒頻移為0.23 kHz,遠小于這4個頻率的最小間隔(4 kHz),不影響遙控數據的解碼。
通過單片機MSP430F169內部的DMA和D/A來產生不同頻率的正弦波信號。對于本次設計系統要求的三種不同頻率的信號,需要分別對它們進行采樣,采樣的點數需要根據系統時鐘頻率及DMA控制器像DAC12傳輸數據的速率來決定。對于數據的采樣,可在碼元持續時間內對所有周期進行采樣,DMA控制器可以按照一定的頻率連續不斷地將這些采樣數據傳輸到DAC12模塊,經DAC12轉換輸出對應的正弦波形。DMA控制器傳輸數據不需要CPU的參與,CPU可獨立于各種低功耗模式。但是需要注意,DMA控制器的傳輸速度要比DAC12處理數據的速度快,所以當使用DMA控制器的時候,應避免DMA控制器和DAC12操作不一致。
4.2 鍵盤掃描及數碼管顯示
設計選用的按鍵通過機械觸點的閉合與斷開來控制輸入點信號的產生。由于機械觸點的彈性作用使得它在斷開或閉合的瞬間會產生抖動,進而使產生的電壓波形如圖4所示。

為了保證系統對一次按鍵按下只作一次處理,需要采取措施消除抖動的影響。對于這個問題,一般采用軟件方法去抖動,在編程過程中,當判斷有鍵按下時加入一定時間的延時子程序,然后再次確定按鍵是否被按下。如果再次確認的結果仍然處于被按下的狀態,則再做該鍵按下的相應處理,這樣就可以避開抖動的時間段,消除抖動影響。
對于數碼管靜態顯示,數碼管每一位的字選線與一個8位端口相連,只要在該位的字選線上出現字形碼,就可以顯示出相應的字符。一般顯示程序并不直接將段碼賦值給對應端口,而是建立一張段碼表,顯示時以所要顯示的數字為索引查詢這張表格。
4.3 系統編程
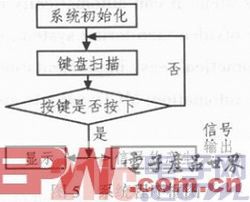
對于本系統來說,其程序框圖如圖5所示,根據框圖完成系統編程。通過對鍵盤進行掃描,來判斷是否有按鍵按下以及按下的按鍵是第幾個,如果按鍵按下,根據所按的按鍵來輸出相應的信號并進行顯示。不同頻率的信號其采樣點不同,對于26kHz、30 kHz、34 kHz的信號,它們的采樣點分別為一周期內22個、20個、19個,當有按鍵按下時,DMA向DAC12傳輸相應的采樣數據,產生所要求的信號。此外,在系統初始化時要開啟8 MHz晶振。
5 系統調試
系統要求兩個填充不同頻率的脈沖之間的間隔為100 ms,脈沖寬度為1ms。將編寫的程序編譯下載到MSP430F169,給系統上電,MSP430F 169輸出端的波形如圖6(a)所示,不同的遙控信號在示波器中的顯示情況是一樣的,再次不一一列舉。圖中示波器時間單位為50 ms,兩脈沖間隔為100μs,滿足設計要求。圖6(b)、(c)、(d)所示為MSP430F169產生的不同頻率的脈沖信號。圖中示波器的時間單位為200μs,脈沖信號的脈寬為1 ms,滿足設計要求。
6 結論
該設計主要從MFSK編碼的基本原理入手,選用比較常用的MSP430F169微功耗單片機作為處理器,進行水聲遙控發射系統的理論研究及軟硬件實現。電路經調試編程后可以準確的完成不同信號的產生、選擇及顯示。在水池實驗里,對相應的接收設備進行控制,操作簡單,誤碼率小,達到了預期目標。

pa相關文章:pa是什么
負離子發生器相關文章:負離子發生器原理 晶振相關文章:晶振原理 脈寬調制相關文章:脈寬調制原理 離子色譜儀相關文章:離子色譜儀原理








評論