基于CAN/LIN息線的汽車混合網關設計

摘 要 隨著汽車電子技術的發展,CAN、LIN總線在汽車網絡中得到越來越廣泛的應用。同時,實現不同性質、不同速率之間的網絡通信也成為必須要解決的問題。本文提出一種高速CAN/低速CAN/LIN網關的設計方案,詳細介紹了CAN、LIN節點電路的設計以及數據的傳輸處理過程。
引 言
隨著汽車電子的發展,傳統的點對點的通信已經不能滿足現代汽車通信的要求。汽車電子網絡技術正成為實現汽車控制系統的首選,它使汽車電子技術進入一個全新的時代。
20世紀90年代,美國汽車工程師協會SAE(Society of Automotive Engineers)將汽車數據傳輸網分成了A、B、C三類:A類網絡主要面向傳感器/執行器的低速網絡,數據傳輸位速率一般小于10 kb/s,目前A類網的首選標準為LIN(LocalInterconnect Network)協議;B類網絡主要面向獨立模塊間數據共享的中速網絡,數據傳輸位速率在10~125 kb/s,目前B類網絡主要采用低速容錯CAN標準ISO11898-3;C類網絡則主要面向高速、實時閉環控制的多路傳輸網,數據傳輸位速率在 125~1 Mb/s之間,歐洲的汽車制造商主要采用高速CAN標準ISO11898-2來實現該類網絡。下面簡要介紹一下CAN協議和LIN協議。
1986年2月,德國的Bosch公司在SAE大會上提出了CAN串行總線。時至今日,CAN已經形成國際標準,憑借自身的優點,不僅在汽車領域,而且在機械、數控機床及傳感器等領域都得到廣泛應用。CAN總線的主要特點有:多主機的工作方式;最大傳輸速率可達1 Mb/s(通信距離最長40 m),直接通信距離可達10 km(速率小于5 kb/s);采用短幀結構,傳輸時間短;良好的檢錯能力;非破壞總線仲裁技術;較高的性價比。
LIN是1998年由BMW等五家汽車制造商、一家軟件工具制造商以及一家半導體廠商聯合提出的一個協議。LIN通信是基于SCI(UART)數據格式,采用單主/多從模式以及低成本的單線連接方式,最高傳輸速率可達20kb/s。LIN的從節點不用晶振或陶瓷振蕩器就能實現自同步。出于以上技術特點, LIN總線實現成本較低,且完全能夠滿足A類網絡的通信需求。
在實際的汽車電子網絡中,A、B、C三類網絡并不是完全獨立的。為了完成車輛的控制及信息共享,不同網絡間必須進行相應的數據交換。由于是三種不同的網絡,它們之間的通信是不能直接進行的,而必須作相應的協議轉換及數據處理后才能實現,這些工作是由網關來實現的。本文提出了一種網關的設計方案,用以實現高速CAN、低速CAN及LIN三種總線網絡之間的通信。
1 網關總體結構
本文所討論的網關其主要任務是解決車載網絡中A、B、C三類網絡的相互通信的問題,實現數據的存儲轉發及高、低速CAN協議之間或低速CAN與LIN協議之間的協議轉換,以便在不同網絡之間實現數據通信。網關主要分為4個部分:實現數據存儲轉發和協議轉換的主控制器,用于與高速CAN網絡連接的高速CAN 節點模塊,與低速CAN網絡連接的低速CAN節點模塊以及與LIN網絡連接的LIN節點模塊。網關系統的電路框圖如圖1所示。
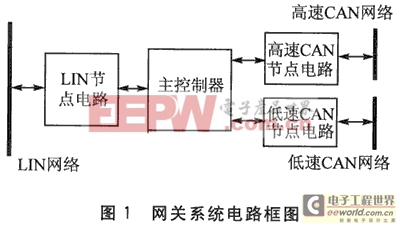
網關中三個節點電路分別與各自的網絡相連,且實現各自對應的網絡與主控制器之間的數據交換。這個數據交換過程是雙向的,既包括從網絡上接收數據并將數據存到主控制器中,又包括從主控制器相應的緩存器中讀取數據并將其發送到自己對應的網絡中。主控制器主要負責數據的存儲及協議的轉換,即將各個節點接收來的數據根據其目的網絡的不同,分別存入不同的緩沖區,并且根據目的網絡的不同,將數據轉化為能夠在目的網絡上傳送的數據格式。
2 網關電路設計
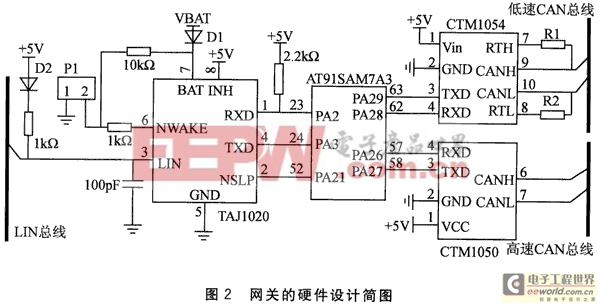
如上所述,網關的硬件電路主要由主控制器、高速CAN節點模塊、低速CAN節點模塊、LIN節點模塊4部分組成。為了滿足網關的正常通信要求,必須考慮主控制器的數據處理能力。另外,由于網關的工作環境為電磁干擾非常嚴重的汽車內部,故還須考慮網關的抗噪聲干擾性能。網關的硬件設計簡圖如圖2所示, AT91SAM7A3為網關的主控制芯片,TJA1020為LIN總線收發器,CTM1054為低速CAN收發器,CTM1050為高速CAN收發器。








評論