基于DSP的疲勞駕駛檢測系統的研究

2.3.1 圖像采集模塊
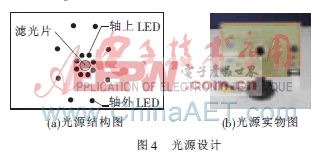
根據亮暗瞳孔的形成原理,要想產生亮暗交替的瞳孔圖像,需要在同一平面內放置兩組近紅外光源,一組放在攝像頭光軸上,另一組置于軸外。當只打開軸上光源時,就可獲得亮瞳孔圖像;當只打開軸外光源時,就可獲得暗瞳孔圖像。由于半導體發光二極管(LED)具有效率高、體積小、壽命長,易于制造成各種特定形狀和容易實現不同照射角度等優點,故光源結構中都采用LED作為發光元件。光源設計如圖4。
2.3.2圖像處理模塊
由于采集的過程中肯定會存在噪聲,所以先用一個3×3的模板對采集到的圖像進行中值濾波,減少噪聲對圖像處理的干擾。圖5是中值濾波后的亮瞳孔圖像和暗瞳孔圖像。

因為采集兩幀圖像的時間間隔非常短,兩幀圖像的位置基本上沒什么變化,由于一幀圖像瞳孔位置是亮點,另一幀圖像瞳孔位置亮度小,而兩幀圖像別的區域亮度值變化不大,所以差分后的圖像瞳孔位置應該是最亮的區域。通過觀察差分圖像,也能發現差分后瞳孔位置基本上是圖像上最亮的部位,可以根據這個特征粗定位人眼。在應用上駕駛員臉部區域離攝像頭鏡頭位置距離在40 cm~1 m之間,連續采集圖像時,眼睛小區域的面積差別不是很大,在差分圖像上找到最亮點Imax1,通過這個亮點找到一個小區域,把這個小區域的亮度值都設定為零后再在差分圖像上找到另外一個最亮點Imax2,根據這個亮點再擴展一個小區域,這兩個小區域就是駕駛員左右眼的區域,如圖6所示。這種方法的優點是粗定位速度快而且可以避免閾值的設定。

目前,用于提取人眼邊界的方法有很多種,包括各種算子的邊緣提取和灰度圖像積分投影等等。在此系統中,可以根據粗定位后圖像的特征來提取人眼邊界。在粗定位圖像中,通過觀察發現,上眼瞼的邊界有一特征,就是上面的灰度值比下面的灰度值大;同理,下眼瞼的邊界特征是:下面的灰度值比上面的大。定義一個模板分兩次在粗定位圖像上搜索,分別找到滿足這兩個特征的點,如圖7(b)。在掃描過程中找到上眼瞼的最高點M(x3,y3)、下眼瞼的最低點N(x4,y4),左臨界點L(x5,y5)、右臨界點R(x6,y6)。得到與眼睛邊界相切的矩形框如圖7(c)。

人眼的高寬比h(t)可以求出如式(2):
2.3.3 疲勞狀態判斷
在前面圖像處理時,差分圖像后會找到兩個點Imax1(x1,y1)、Imax2(x2,y2)。人眼睜開情況下,這兩個點應該在左右瞳孔里,由于左右瞳孔是對稱的兩個區域,通過實驗測試亮點的垂直坐標距離在[0,10]區間里并且水平坐標距離在[25,50]區間里,依此作為依據判斷是否檢測到人眼。設定一個計數函數,如果連續五次檢測都沒有檢測到對稱的雙瞳孔說明人眼完全閉合了,軟件通過GPIO口啟動蜂鳴器提醒駕駛員。
在能定位人眼時根據PERCLOS值來判斷疲勞狀態,如前面原理描述一樣處理。
2.3.4報警系統
報警系統采用價格便宜的蜂鳴器,用DSP的GPIO口控制蜂鳴器的啟動與停止。
3 實驗結果及分析
利用實驗室的設備制作光源,將DSP開發板與光源和仿真器連接,通過仿真器連接PC機和開發板,在CCS3.3環境下調試該系統,最后把程序嵌入到開發板中。連續采集兩幀圖像的時間間隔為20 ms,為了盡量加快圖像處理時間并且滿足系統需要,圖像大小設定為360×384。測試結果如表1所示。

檢測失誤的原因是:雖然安裝了近紅外高通濾光片,但白天陽光強烈時陽光中的近紅外光也很多,影響光源的光照強度,因考慮到成本,濾光片的效果一般,影響了系統的試驗結果。另外出現判斷失誤的原因是,測試人員頭部左右擺動幅度太大,攝像頭采集圖像時采集不到人眼圖像。
此系統的主要優點是定位方法簡單并且實用,針對人眼的不同狀態,系統分別采用不同的判斷疲勞標準,這種方法減小了誤判率,縮短了系統處理時間,但有一些缺陷還需要改進。首先,利用亮瞳效應定位人眼,當駕駛員戴眼鏡時會出現亮斑再用此方法定位人眼就會出現錯誤定位。其次,通過研究表明紅外光長期照射人眼不健康,以后可以嘗試減少紅外光的照射時間,用可見光和紅外光混合使用。

評論