智能化倒車雷達主控芯片系統概述

1 引言
隨著汽車普及率的逐年增加,消費者在將汽車作為交通運輸工具的同時,對汽車配置有了更多的要求,尤其是對舒適性和安全性提出了更高的要求。對于很多司機尤其是新手來說,倒車無疑是件非常頭痛的事,倒車雷達正好可以幫司機解決這個難題,因此越來越多的商家進入了這個市場。從目前市場情況看,國內倒車雷達生產廠家都是使用單片機配合外圍運放、鎖相環電路完成超聲波測距并提供報警的工作,缺乏單芯片方案,而使用單片機方案要求生產廠家必須具備開發軟硬件的能力,而且利用軟件控制存在不穩定的因素。如果能用專用芯片實現整個系統功能,對倒車雷達生產商來說,不僅能降低開發和生產成本,對整機的可靠性也有很大提高。
2 系統概述
2.1 系統框圖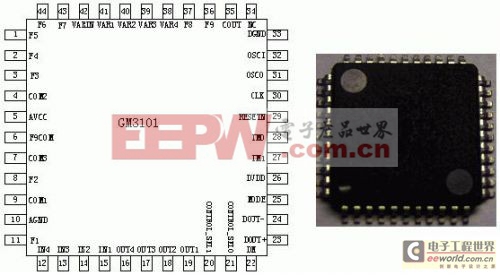
圖1 芯片管腳圖示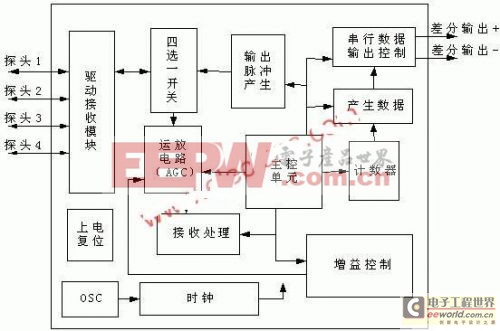
圖2 系統內部結構框圖
2.2 功能概述
系統提供4個超聲波探頭接口,接收到反射回來的信號后,根據發送和接收的時間差判斷障礙物距離的危險等級,輸出相應報警信號。報警信號編碼后采用雙線差分方式輸出,輸出信號的內容包括:各探頭檢測到的障礙物距離的危險等級、最近障礙物的方位、最近障礙物的距離值和附加消息。
2.3 接口協議
報警信號采用雙線差分串行輸出的方式,目的是提高傳輸信號在長距離和強干擾環境下的傳輸正確性。雙線差分傳輸具體格式是:ALOUTP輸出實際需要的信號,ALOUTN 則輸出與ALOUTP相反的電平信號。
2.3.1 倒車模式
報警信號以數據包格式輸出,每個數據包包括3個字節,格式和內容如下所述:
第一個字節:第一字節高四位為起始標志,用于說明此報警數據是倒車模式下的數據還是扒車模式下的數據,倒車模式是“0101”,扒車模式是“1010”。倒車模式下數據格式如圖3所示,第一字節的低2兩位用于輸出附加消息,輸出數據指示1或4探頭是否進入環境適應模式,S1表示探頭1是否進入環境適應模式,“1”表示進入環境適應模式,“0”表示正常倒車模式;S4表示探頭2是否進入環境適應模式,“1”表示進入環境適應模式,“0”表示正常倒車模式。低4位SX1和低3位SX0表示最近障礙物的方位,00表示是探頭1方向,01表示是探頭2方向,10表示是探頭3方向,11表示是探頭4方向。
圖3 第一字節數據格式
第二個字節:如圖4所示,SXA和SXB表示X號探頭檢測到的障礙物的危險等級,危險等級分為安全、警告、危險、停車4級,分別用00、01、10、11表示。例如第二字節數據為“10010000”,表示第一個探頭檢測到危險狀態,第二個探頭檢測到警告狀態,第三和第四個探頭為安全狀態。
圖4 第二字節數據格式
第三字節:第三字節輸出最近障礙物的距離值,數據格式如圖5所示,DA1DA0表示最近障礙物距離的第一位數據,按BCD編碼,最大值為3;DB0~DB3表示最近障礙物距離的第二位數據,按BCD編碼,最大值為9;DC0表示第三位數據,0表示0,1表示5。
圖5 第三字節數據格式











評論