飛思卡爾智能車舵機和測速的控制設計與實現

“飛思卡爾”杯全國大學生智能汽車競賽以快速跑完規定賽道為目標。盡可能提高車模速度,跑出好成績,是整個車模設計的關鍵。為了進一步提高車模速度,作者曾在車模調試階段嘗試算法、程序控制等多種方法都無明顯效果,經多次分析發現,舵機的優化及其控制尤為重要,特別合適舵機轉向和速度檢測反饋控制。經過不斷改進、調試和優化,該設計方案能夠使智能車行駛速度和穩定性都得到顯著提高。
1 車模系統
飛思卡爾智能車系統主要由一系列的機械零部件和控制軟件組成,主要包括由大賽組委會統一提供標準的車模底盤、輪胎、舵機、驅動電機、PC9S12控制板和電源等,另外,系統中的道路檢測裝置和測速裝置需自行設計安裝。圖l為車模系統框圖。
要賽出好的成績,智能車除應具有可靠的道路檢測裝置外,舵機的靈活轉向控制則依賴于機械系統中各個零部件間協調運行。為提高智能車的整體協調性能,一定要把握好“車身簡捷、底盤低穩、轉向靈活、協調匹配”的設計與安裝原則。
2 舵機
舵機是操控車模行駛的方向盤。舵機的輸出轉角通過連桿傳動控制前輪轉向,其轉角精度直接影響到智能車模能否準確按賽道路線行駛,此外,還可考慮采用舵機進行機械閘制動以及多個舵機群控等方法。但飛思卡爾智能汽車大賽規則要求車模中的舵機不能超過3個。
2.1 舵機工作原理
舵機在6 V電壓下正常工作,而大賽組委會統一提供的標準電源輸出電壓為7.2 V,則需一個外圍電壓轉換電路將電源電壓轉換為舵機的工作電壓6 V。圖2為舵機供電電路。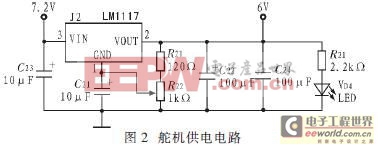
舵機由舵盤、位置反饋電位計、減速齒輪組、直流動電機和控制電路組成,內部位置反饋減速齒輪組由直流電動機驅動,其輸出軸帶動一個具有線性比例特性的位置反饋電位器作為位置檢測。當電位器轉角線性地轉換為電壓并反饋給控制電路時,控制電路將反饋信號與輸入的控制脈沖信號相比較,產生糾正脈沖,控制并驅動直流電機正向或反向轉動,使減速齒輪組輸出的位置與期望值相符。從而達到舵機精確控制轉向角度的目的。舵機工作原理框圖如圖3所示。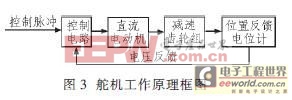
2.2 舵機的安裝與調節
舵機的控制脈寬與轉角在-45°~+45°范圍內線性變化。對于對速度有一定要求的智能車,舵機的響應速度和舵機的轉向傳動比直接影響車模能否以最佳速度順利通過彎道。車模在賽道上高速行駛,特別是對于前瞻性不夠遠的紅外光電檢測智能車,舵機的響應速度及其轉向傳動比將直接影響車模行駛的穩定性,因此必須細心調試,逐一解決。由于舵機從執行轉動指令到響應輸出需占用一定的時間,因而產生舵機實時控制的滯后。雖然車模在進入彎道時能夠檢測到黑色路線的偏轉方向,但由于舵機的滯后性,使得車模在轉彎過程中時常偏離跑道,且速度越快,偏離越遠,極大限制車模在連續彎道上行駛的最大時速,使得車模全程賽道速度很難進一步提高。為了減小舵機響應時間,在遵守比賽規則不允許改造舵機結構的前提下,利用杠桿原理,采用加長舵機力臂的方案來彌補這一缺陷,加長舵機力臂示意圖如圖4所示。
圖4中,R為舵機力臂;θ為舵機轉向角度;F為轉向所需外力;α為外力同力臂的夾角。在舵機輸出盤上增加長方形杠桿,在杠桿的末端固定轉向傳動連桿,其表達式為:
加長力臂后欲使前輪轉動相同角度時,在舵機角速度ω相同的條件下舵機力臂加長后增大了線速度v,最終使得舵機的轉向角度θ減小。舵機輸出轉角θ減小,舵機的響應時間t也會變短。同時由式(1)可推出線速度口增大后,前輪轉向所需的時間t相應也會變短,其表達式為:t=ds/dv (2)
此外,當舵機連桿水平且與舵機力臂垂直時,得到力矩M,可由式(3)表示:M=FRsinα (3)
說明當舵機連桿和舵機力臂垂直時α=900°,此時sinα得到最大值。在舵機力臂R一定和外力F相同條件下,舵機產生的力矩M最大,實現前輪轉向的時間最短。
在實際調試車模時發現,這種方法對提高舵機的響應速度也具有局限性:當在舵機輸出力矩相同的條件下,力臂越長,作用力越小。在轉向遇到較大轉向阻力時,會影響舵機對轉向輪控制的精度,甚至使轉向輪的響應速度變慢;另外,舵機機械結構精度產生的空程差也會在力臂加長中放大。使得這一非線性環節對控制系統的不利影響增大。因此,舵機安裝的高度具有最佳范圍,仍需通過試驗反復測試。














評論