改進永磁同步電機轉矩控制精度的措施

自20世紀60年代末以來,面向磁場的矢量控制一直是交流電機控制的主流。這樣的控制方法的主要特點是對電機氣隙磁場和轉矩進行分開控制。對于永磁同步電機,典型的控制設計就是考慮恒定的磁通會產生一個轉矩常數kt,該常數在大多數電機的技術手冊中都能找到。獲得需要的轉矩m所對應的電流iq也由此計算得到。但是,輸出轉矩和相應的電流iq之間的這種恒定關系的可信度很容易受到各種各樣的實際因素的負面影響,這樣的影響很容易產生轉矩控制中所不能接受的精度偏差。一些容易影響的實際因素如下:
●產品出廠過程與材料的老化;
●鐵心材料在過載時飽和;
●磁阻轉矩變化;
●電樞(磁性材料)的溫度。
磁材料(磁介質)的分散性導致的實際轉矩常數與數據手冊上的數值偏差可能會超過5%。更嚴重的是通過觀察發現,經過一段較長時間,永磁電機的磁場會下降幾個百分點。由于這樣的變化通常十分緩慢,一種電機離線參數辨識(將在“一種電機模型的預辨識系統”部分中討論)將解決這一問題。
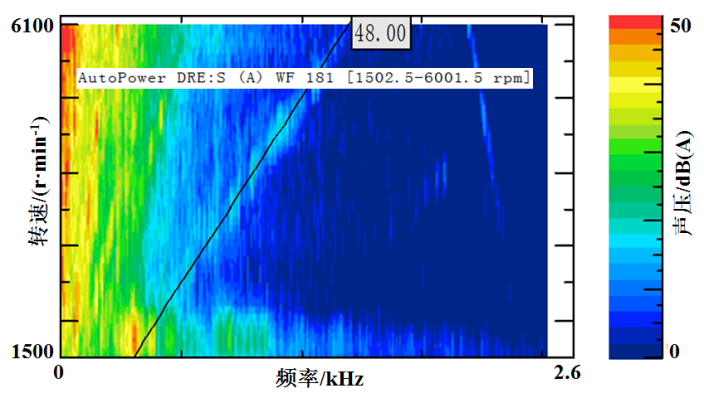
與此形成鮮明對比的是,在過載時,由于鐵心飽和造成的輸出轉矩降低會在很短時間內發生,而且降低量最多時會達到20%。圖1所示的即為某額定轉矩mn=23nm,額定轉速nn=2000r/min的永磁同步電機運行在不同轉速條件下所測得的轉矩精度。這臺電機未采取任何精度改進措施。這次的測量數據將為評價后面提到的精度改進策略提供參考。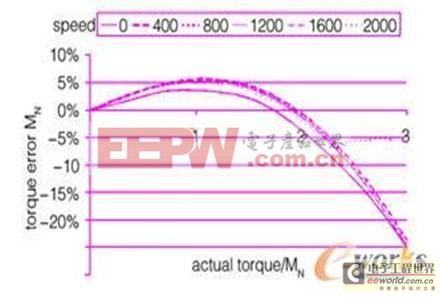
圖1 轉矩精度(對比參照)
實驗數據是通過圖2所示的測試裝置采集到的。圖中右側的被測試電機運行在轉矩控制模式下,而左側的負載電機運行在速度控制模式下。兩個電機通過一個轉矩測量軸耦合。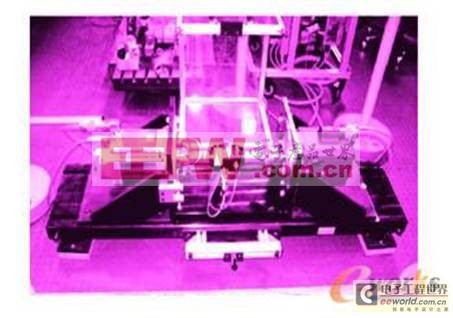
圖2 轉矩測量裝置
實際的兩臺電機在設置點mset=0nm處的相對轉矩要從被測試電機上的所測的轉矩曲線中減去。因為這一轉矩在后來的研究中被當作是對運行中的摩擦轉矩所抵消。而且,除了黏性摩擦之外的其他因素也是存在于這個系統中的,但以上的假設(相對轉矩補償摩擦)是實際自動辨識系統的執行原則,是正確的。
很明顯,圖1所示的轉矩精度是與速度無關的。電機停轉時的特性出現偏差,因為轉矩的脈動影響到凸極電機的轉角。在2000r/min的轉速下,轉矩精度偏差在2.3mn處發生了轉向,這是由于電機此時開始顯示去磁特性并且沒有考慮磁阻轉矩。
當出現去磁效應時,磁場產生的電流id將不能被忽略。這時的關鍵是考慮電機磁阻轉矩的影響,從而獲得一個準確的實際轉矩值mact,如公式(1)中所示。但是,通常來說,磁阻轉矩常數kt,rel在電機的數據手冊中不提供,因而必須通過參數辨識的方式獲得。如果電磁轉矩常數為零,高轉速下轉矩就會出現大的偏差,如圖3所示。
mact=ktiq-kt,reliqid (1)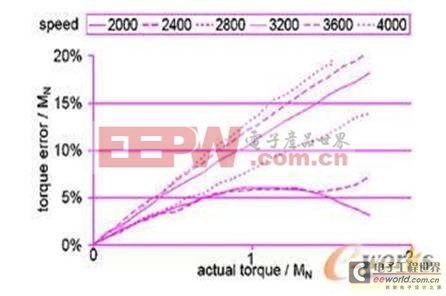
圖3 在弱磁范圍內的轉矩精度
更重要的是,實驗表明:對于一些高轉速的主軸電動機,公式(1)并不適用。在這種情況下,“多項式離線自適應控制系統”中討論的離線自適應策略將不能用,必須用到在線自適應策略。
當遇到電機電樞溫度變化較大時,只有在線自適應策略是有效的。使用釹鐵硼nd2fe14b磁性材料的永磁同步電機每100k的溫度變化會有約4%的磁鏈損失。老式的使用釤鈷smco5磁性材料的永磁同步電機每100k溫度變化的磁鏈損失甚至達到10%。
一種電機模型的預辨識系統
獲取電機的定子電阻與電感參數是電機模型辨識的第一步,因為這是進一步識別電機參數的前提條件。這兩個參數可以通過靜態電機測量方法獲得,如例二中使用正弦測試電流。但是,對于轉矩常數kt的測量就只能在電機加速時進行了,因為這套辨識系統是基于輸送到電機上的實測有功功率和軸輸出功率工作的。所以,要測得轉矩常數kt,需要先測得有功功率。有功功率需要電機以額定轉矩電流從靜止加速到額定轉速,并且在一個產生足夠大電動勢的速度下才可測得。求得電阻損耗 以及實際轉速nact和實際轉矩mact才能確定轉矩常數kt。
以及實際轉速nact和實際轉矩mact才能確定轉矩常數kt。
對于在d軸和q軸電感不同的電機,確定磁阻轉矩常數kt,rel就相當重要了。
在電機參數辨識之后,電機將按附表參數下運行:
圖4顯示在電機參數辨識之后的轉矩精度,從圖中可以看到,在額定轉矩的范圍內,轉矩偏差已經縮小到2%以內。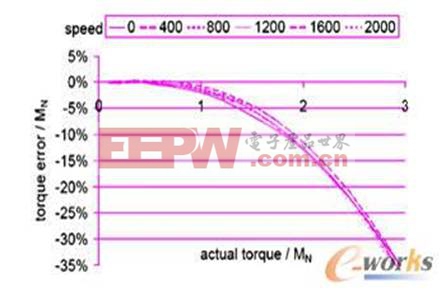
圖4 電機參數辨識后的轉矩精度











評論