汽車雷達傳感器組網技術研究

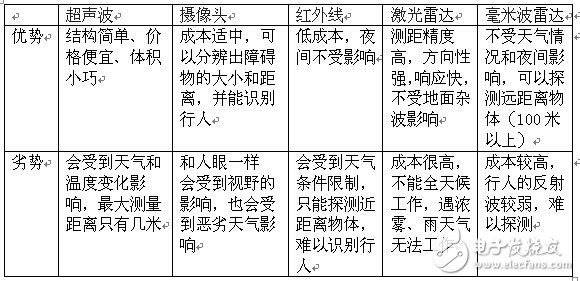
隨著人們對汽車駕駛過程當中安全性、舒適性要求的不斷提高,汽車雷達被廣泛的應用在汽車的自適應巡航系統,防碰撞系統以及駕駛支援系統中。其中,毫米波雷達因探測精度高、硬件體積小和不受惡劣天氣影響等優點而被廣泛采用。
但是傳統的單一雷達傳感器還是存在著諸如探測范圍小、可靠性低等缺點。特別是在復雜的行駛狀況下,并線、移線、轉彎、上下坡以及道路兩旁的靜態護欄、標志牌、行人都會使得雷達對主目標的識別十分困難,誤報率很高。
要想完全解決好雷達的誤報問題,還需要采取多傳感器之間的信息融合技術。通過將各種雷達傳感器集成在一起構成的一個網絡系統綜合了各種傳感器的優勢,實現了信息分析、綜合和平衡,利用數據間的冗余性和互補特性進行容錯處理,克服了單一傳感器可靠性低、有效探測范圍小等缺點,有效地降低了雷達的誤報率。由此構成的新的、高精度的傳感器網絡,能夠極大地改善汽車雷達網絡系統的性能。
雷達網絡的構成原理
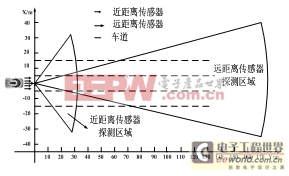
圖1所示的雷達網絡由四個等距離分布在安全杠上的近距離毫米波雷達傳感器(Neardistancesensor,NDS)構成,每個雷達傳感器均采用FMCW體制。該傳感器網絡可在35米的范圍內實現水平方位角為120°的覆蓋面。這種近距離、大覆蓋面的雷達傳感器網絡可以在車速不高,路面狀況比較復雜的情況下(例如市內交通),監控汽車前向較大范圍內的目標。
如果需要遠距離探測,可以在安全杠中間增加一個遠距離雷達傳感器。隨著77GHz汽車雷達傳感器技術的成熟,近/遠距離雷達傳感器都傾向于采用77GHzMMIC(毫米波集成電路)技術實現,采用這種技術容易做出一體化的設計方案,使收發模塊的成本大為降低。
在圖2所示傳感器網絡系統框圖中,基于77GHzMMIC技術的雷達傳感器是構成汽車雷達網絡的前端關鍵硬件,后端的信息處理需要用數字信號處理器等高速運算單元來完成。傳感器、數字信號處理單元以及數據融合決策系統之間采用以太網、高速串行連接的方式傳送數據,以滿足高數據率的傳輸要求。
數據融合系統采用分布式體系結構,即每個近距離傳感器對獲得的回波信號先進行局部處理,然后送入融合中心進行融合以獲得目標的方位、速度信息。控制器是整個雷達網絡系統的最終決策機構,它負責識別目標的距離和速度信息是否對行車安全構成威脅,并通過聲光的形式提示駕駛員或者直接作用于車載控制系統加以調整。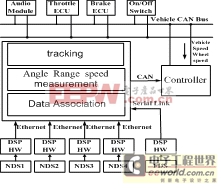
圖2雷達網絡系統結構圖




評論