磁懸浮軸承控制器MAX115與DSP的接口設計

在五自由度主動磁懸浮軸承控制系統中,采用由工控PC+DSP控制器的架構是一種較好的方法,而DSP核心控制器則是磁懸浮軸承控制系統中非常重要的一部分,對主軸位置信號的精確采集是DSP控制器的首要任務。在本控制器中采用MAX115對主軸位置的模擬信號進行采集。
磁懸浮控制器中的ADC選擇
在磁懸浮主軸控制器的設計中,對主軸位置的測量是至關重要的。位置傳感器的信號經過適當的信號調理電路處理后被傳送到A/D采樣通道,ADC把得到的模擬信號轉換成相應的數字信號,芯片采樣的精度和分辨率以及采樣轉換時間是非常重要的技術參數,它們直接決定著控制速度和控制精度。本控制器中采用的傳感器是一種電渦流位移傳感器。它是一種高精度無接觸式傳感器。
本系統要求能分辨1mm位置信號,根據傳感器的傳感特性,必須要求有至少為12位的分辨率。同時本系統中要求絕對精度不低于±1LSB。 由于磁力軸承系統要求的控制周期很短(一般小于200ms),故要求ADC的采樣時間也必須很快(一般在20ms內)。
綜上考慮選用Maxim公司的MAX115作為ADC來完成主軸位置信號的采集。MAX115是12位2×4通道同步采樣逐次比較型ADC,其具有兩組ADC,每組4通道連續采集保持;單通道轉換時間為2ms;轉換精度±1/2LSB;4通道傳輸率為16ksps;并且內部具有2.5V參考電壓和10MHz時鐘,極大地精簡了外部附加電路;其高速的并行接口可以方便地與DSP相連。
MAX115與TMS320F240的接口電路
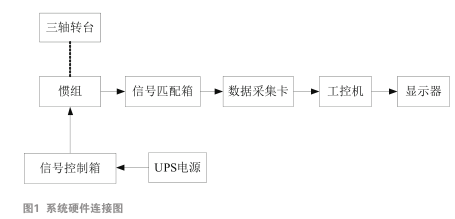
圖1是磁懸浮軸承DSP控制器的結構簡圖。圖中4路主軸位置信號經由MAX115進行A/D轉換后,采集結果通過中斷方式輸入到DSP內。DSP經過濾波算法處理后,將采集數據寫到雙口RAM內,計算機通過ISA總線訪問雙口RAM并將其中的數據取走,進行上位機的圖形顯示、數據分析等功能。同時DSP進行控制算法計算,計算之后將控制數據通過控制器板卡上的4路DAC輸出給功率放大器,從而實現對主軸的控制。這樣,利用DSP處理速度快的特點來完成算法的計算,利用PC機強大的多媒體處理特點來實現主軸位置監視和數據分析,DSP和PC同時相對獨立工作,互不影響,從而加快了系統的處理速度。

圖1 磁懸浮軸承DSP控制器的結構簡圖

圖2 MAX115與TMS320F240 DSP之間的接口電路圖












評論