電動汽車電機控制系統安全監控功能的設計與實現

第一步,對電機控制芯片各個模塊進行初始化配置,使各個模塊配置在正常工作時的狀態,初始化結束后判斷各模塊初始化的狀態,若有初始化失敗的模塊,報出模塊故障代碼,進入故障模式。
本文引用地址:http://www.j9360.com/article/235424.htm第二步,對電機控制芯片各個模塊進行自檢。如圖5所示,自檢程序會對內存、IO模塊、AD采樣模塊、通信模塊、PWM模塊、看門狗等模塊進行測試,具體測試如下:
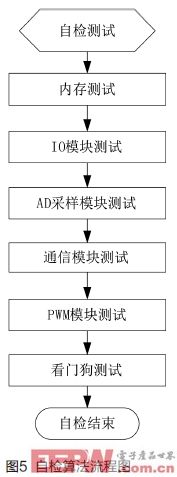
內存測試:主要對程序使用到的RAM、ROM、Flash進行測試,校驗RAM是否工作正常,ROM中軟件是否被改動,讀取是否正常;
IO模塊測試:測試IO模塊工作是否正常,IO控制單元配置是否正確;
AD采樣模塊測試:測試AD采樣模塊工作是否正常,采樣頻率,通道選擇是否正確,控制單元設置是否正確;
通信模塊測試:測試CAN通信、SPI通信模塊是否工作正常,波特率設置是否正確,模塊配置是否正確,和安全監控芯片通信是否正常,安全監控芯片工作是否正常;
PWM模塊測試:測試PWM模塊工作是否正常,時鐘設置是否正確,輸出通道配置是否正確;
看門狗測試:測試看門狗定時,時間配置是否正確,能否正常工作。
如果這些測試通過,說明各模塊工作正常,系統配置正確,滿足系統運行條件,系統可以繼續運行;若測試不通過,則需要記錄不通過的模塊錯誤代碼,系統進入故障模式,并把這個錯誤代碼通過CAN發送出去。
當這些測試都通過后,系統進入正常周期運行模式;若自檢不通過,系統報出自檢故障代碼,進入故障模式。
第三步,系統周期控制任務。對電機控制的所有工作都在這部分完成,這部分也是傳統的電機控制部分。供電電源監控、電壓監控、電流監控、溫度監控、速度監控和外部看門狗等監控都在這部分完成,如果系統有故障,則報出故障代碼,進入故障模式;若系統正常進入下一步。
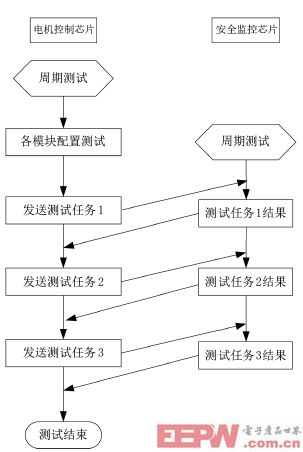
第四步,系統周期測試任務,如圖6所示。周期測試任務是同時在電機控制芯片與安全監控芯片中進行的。周期測試任務開始后,首先對電機控制芯片各個模塊的配置文件進行檢測,測試各個模塊的配置是否被非法改動,是否與正常配置一致;然后向安全監控芯片發送特定的測試任務,安全監控芯片收到任務后,按照預定的算法計算出測試結果反饋給電機控制芯片,這些測試任務可以根據實際的需要增加或者減少。電機控制芯片根據接收到的安全監控芯片的測試結果判斷程序運行是否正常,是否有非預期的運行結果,如果測試結果通過,則系統進入周期運行模式,循環的運行系統周期控制任務和周期測試任務;若測試不通過,則報出故障代碼,同時系統進入故障模式。
5 結論
電機驅動系統安全監控功能不但能夠實時監控電機負載的運行情況,而且還能對電機控制芯片的運行狀態進行監控,及時發現故障并處理,故障診斷全面,覆蓋率高,大大提高了電機驅動系統運行的安全性與可靠性。
參考文獻:
[1]鄔肖鵬,劉飛,熊璐,余卓平. ISO26262標準下永磁同步電機故障對整車安全性的影響分析[J].汽車技術,2013,02:13-18
[2]文凱,夏珩,裴鋒,等.基于ISO 26262的電動四驅混合動力系統功能安全概念設計[J].機電工程技術,2012,12:74-76
[3]張俊.純電動汽車高壓電安全監控系統研究[D].浙江工業大學,2012
[4]徐毅.基于TC1782的純電動汽車整車控制器設計與實現[J].輕工科技,2012, 11:52-53, 65
[5]蔡交明,王瑛,陳立沖,王金磊. 一種車用電機控制系統及安全監控方法[P].中國發明專利, CN201310454466.4.2013-12-25
[6]羅曉,林偉義,陳立沖,王瑛,黃彬,蔡交明. 一種純電動車電機驅動系統安全監控方法[P].中國發明專利, CN201210158689.1.2012-10-03
[7]ISO 26262, Road vehicles-Functional safety[S], 2011








評論