基于MSP430單片機的PID參數整定義

PID控制是最常的控制策略,在工業過程控制中90%以上的控制回路具有PID結構。PID控制之所以被廣泛應用主要是因為它算法簡單,在實際中容易被理解和實現,而且許多高級控制都以PID控制為基礎。但是由于環境的變化,使被控對象具有時變性,參數經過一段時間以后會出現性能欠佳、適應性變差、控制效果下降等情況。因此,尋求參數自動整定技術,以適應復雜工況及高性能指標的控制要求,是實現節能優化控制的重要手段,具有重大的工程實踐意義。
1 自整定過程原理
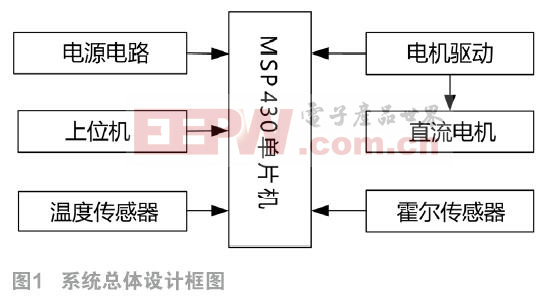
本文主要研究了一種手持式的PID參數整定儀器,此整定儀具有整定單變量和雙變量的雙重功能,控制系統主要采用低能耗的MSP430微控制器,軟件部分采用的軟件開發平臺是IAR MSP430 V3.42A。
PID參數整定儀的實現不僅能夠簡化過程控制工程師的工作量,而且能夠改善整個PID控制領域的控制性能,在能源日益緊張的今天,對于節約能源起到非常重大的作用。自整定過程如圖1所示。其中過程1與過程2是兩個具有耦合的過程。
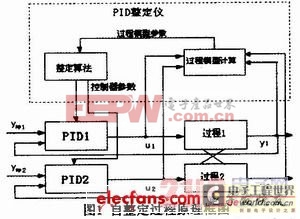
具體過程為:整定儀提取過程的輸入輸出信號,然后通過過程模型計算部分計算出過程模型,將過程模型參數送給整定儀的算法整定部分,根據過程模型參數如果判斷系統為單變量系統則采用幅值相位裕度法對其進行整定,如果為雙變量則采用RGA失調因子法對其進行整定,最后將整定的結果顯示在LCD顯示屏上。

評論