基于M68HC08的LIN節點設計與實現

引言
隨著汽車電子業的飛速發展,車輛上的電子裝置越來越多,電子裝置之間的控制也越來越復雜。傳統的布線連接方式,不僅使線束變得更加粗大、質量增加,使車內可利用的空間變小,且由于線路復雜,故障率增加,還會給維修帶來很大的不便。通過車用現場總線技術建立車身控制局域網,對汽車電子裝置、電器設備進行管理和控制,實現分布式多路傳輸,大大簡化汽車的線束,減輕線束的質量,提高了系統工作的可靠性、穩定性。
LIN(Local Interconnect Network)是由汽車廠商專門為汽車開發的一種低成本串行通信網絡,用于實現汽車中的分布式電子系統控制,其主要目的是為現有的汽車控制網絡 CAN(Control Area Network)提供輔助功能。在對CAN總線通信要求低的場合,諸如智能傳感器和制動裝置之間的通信,使用LIN總線可大大降低成本。
1 LIN總線介紹
LIN是一個串行通訊協議,它有效地支持汽車應用中分布式機械電子節點的控制。LIN總線控制方式是帶單主機節點和一組從機節點的A 類(10kbit/s(低速))多點總線。
1.1 LIN總線特點
(1) 采用低成本單線12V進行數據傳輸,線的驅動和接收特性符合改進的IS09141單線標準;(2) 傳輸速率可達20kbit/s;(3) 采用單主/多從結構,不需要總線仲裁,由主節點來控制總線的訪問;(4) 基于通用UART/SCI的硬件接口,可使用低成本的半導體工藝實現,幾乎所有的微控制器都有LIN必需的硬件;(5) 從節點不需要晶振或陶瓷振蕩器就可實現自同步,從而減少了從節點的硬件成本;(6) 能保證最差狀況下信號傳送的等待時間,可避免總線訪問沖突。
1.2 LIN總線通信機制
LIN總線是基于SCI(UART)數據格式,采用單主控制器/多從設備的模式,僅使用一根12V信號總線。一個LIN 網絡由一個主節點、一個或多個從節點組成。所有節點都有一個從通訊任務,該通訊任務按功能分為發送任務和接收任務。主節點還有一個主發送任務,一個LIN 網絡上的通訊總是由主發送任務所發起的。主控制器發送一個起始報文,從控制單元在接受并且濾除消息標志符后,一個從任務被激活并且開始本消息的應答。
1.3 LIN報文幀
報文幀由主機任務向從機任務傳送同步和標識符信息,并將一個從機任務的信息傳送到所有其他從機任務。主機任務位于主機節點內部,它負責報文的進度表、發送報文頭(HEADER)。從機任務位于所有的(即主機和從機)節點中其中一個主機節點或從機節點發送報文的響應(RESPONSE)。
一個報文幀(圖1)是由一個主機節點發送的報文頭和一個主機或從機節點發送的響應組成。報文幀的報文頭包括一個同步間隔場(SYNCH BREAK FIELD)、一個同步場(SYNCH FIELD)和一個標識符場。報文幀的響應(RESPONSE)則由3個到9個字節場組成:2、4或8字節的數據場(DATA FIELD)和一個校驗和場(CHECKSUM FIELD)。字節場由字節間空間分隔。報文幀的報文頭和響應是由一個幀內響應空間分隔,最小的字節間空間和幀內響應空間是0。
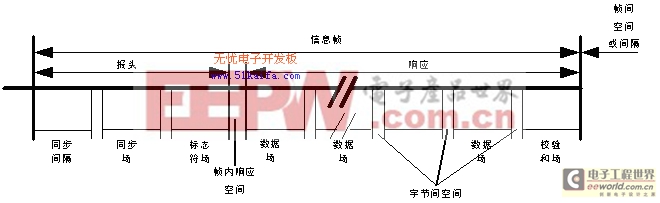
圖1 LIN報文幀
2 LIN節點設計
2.1 M68HC08系列芯片簡介
Motorola 的M68HC08是一種高性能的8位單片機系列,具有速度快、功能強和價格低等特點。它的CPU與M68HC05單片機向上兼容,具有16位變址寄存器和堆棧指針,有200余條指令和10余種尋址方式,最快指令周期僅為0.125μS。
2.2 LIN主節點設計
本設計選用M68HC08系列的MC68HC908GZ32作為LIN主節點的MCU,其電路原理如圖2所示。選用MC68HC908GZ32,主要因為它具有如下其特點:
·32 Kbytes FLASH,1536 bytes RAM
·8-MHz內部總線頻率
·豐富的I/O資源
·兩個雙通道16bit定時接口模塊(TIM)
·一個MSCAN08 (Motorola 可升級的CAN)控制器模塊
·一個串行外圍接口(SPI)模塊
·一個增強型串行通信接口(ESCI)模塊
ESCI模塊可以使MCU和外圍設備及其它MCU異步通信,故它可以作為LIN的主結點。由于MC68HC908GZ32內部帶有CAN控制器(MSCAN08),因此它除了能夠作為LIN的主節點,還可以作為CAN/LIN網關。
本設計選用64腳QFP封裝的GZ32芯片,VDD,VDDA,VDDAD均由+5V供電,TXD、RXD引腳分別接 LIN的收發器(TJA1020)的TXD、RXD引腳,經過收發器LIN引腳出來的信號就是+12V的LIN信號了。GZ32的CANRX與CANTX 引腳分別接CAN收發器(TJA1050)的RXD和TXD,經過收發器CANL和CANH引腳出來的就是具有差分信號的CAN信號。GZ32其它的大部分引腳都可以做I/O口使用,滿足車身電器控制的需要。

圖2 LIN主節點的電路原理圖
主節點可以采用查詢或中斷的方式發送主機任務,本設計采用中斷的方式發送主機任務。首先發送同步間隔(13個bit的顯性電平加1個bit的隱性電平),GZ32里面專門用中止位(SBK)來發送同步間隔。將寄存器SCC2中的發送中止位SBK置1即會裝載中止符(全0)置發送移位寄存器,再將SBK置0,移位寄存器中止最后一個中止符且至少發送1個邏輯1,構成13個bit的低電平和1個bit的高電平。同步間隔是區別全零數據字節的關鍵,必須按照這種方式發送才能把它與全零字節區別開來。然后按照SCI串行格式發送同步場0x55和標志符場。如果主節點還有從機發送任務,還需要按照SCI串行格式發送數據場和校驗和場。
2.3 LIN從節點設計
本設計選用M68HC08系列的MC68HC908QL4作為LIN從節點的MCU,其電路原理圖如圖3所示,選用MC68HC908QL4,主要因為其具有如下特點:
·4096 bytes FLASH, 128 bytes RAM
·5-V 和 3.3-V 工作電壓
·5 V時內部總線頻率為8-MHz ,3.3 V 時為4-MHz
·一個雙通道16bit定時接口模塊(TIM)
·13個雙向輸入輸出口,1個只輸入口
·一個LIN從機接口控制器(SLIC)模塊
SLIC模塊用來提供LIN總線上從機的連通性,與通用I/O口共享其引腳。它有以下特點:
·自動的波特率設置和LIN信息幀同步
·自動識別和確認LIN信息的同步間隔和同步場
·自動計算校驗和場和確認錯誤報告
·無錯誤的情況下每個標準LIN信息幀可有最多2個中斷
·高速的LIN可以從83.33 kbps 到 120.00 kbps
本設計選用16腳TSSOP封裝的QL4芯片,VDD接+5V電源,SLCTX、SLCRX引腳分別接LIN的收發器(TJA1020)的TXD、RXD引腳。經過收發器LIN引腳進來+12V的LIN信號,經過收發器轉換成+5V的接受和發送信號,分別傳到QL4的接受和發送引腳。

圖3 LIN從節點電路原理圖
從節點在初始化完成后,其它操作都在中斷里面完成。SLIC狀態向量寄存器(SLCSV)提供一個索引偏移量直接反映 LIN模塊當前的工作狀態,它可以和用戶提供的跳轉表一起用來快速進入一個中斷服務子程序。LIN模塊的所有狀態在SLCSV里面都有相應的值對應,其值不僅反映LIN模塊狀態的索引偏移量,還反映中斷的優先級。
3 LIN節點在車身控制中的應用示例
“長安之星”SC6350汽車是長安公司推出的具有轎車性能的微型客車,其車身電器包括:前后車燈、雨刮電機、升降車窗、中控門鎖、空調、車身儀表等,共達近百個。因為用電器比較多,主體設計采用CAN/LIN結合的網絡方式,按照用電器的就近原則,將整個車身網絡分成五個部分,如圖4所示。
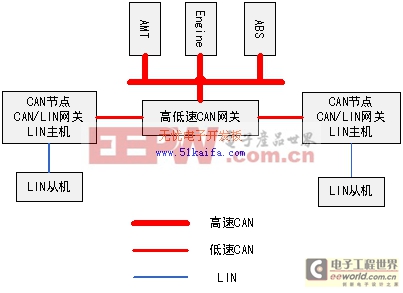
圖4 長安SC6350車身網絡圖
汽車前端放置高低速CAN網關(采用MC9S12DG128微控制器),其高速CAN與對信號的傳輸實時性要求很高的用電器如AMT、ABS、Engine相連,其低速CAN與組合開關和大部分用電器的開關相連。汽車前面兩側放置兩塊GZ32電路板,它控制汽車前面兩側的車燈和一些電機,同時它還作為LIN網絡中的LIN主節點。LIN網絡從節點(QL4電路板)放置在汽車后面兩側,控制汽車后面的車燈和電機。由于汽車后部的用電器比較少,需要使用的I/O口就比較少,正好符合QL4 I/O口比較少的特點。
長安SC6350汽車后部的用電器包括后左轉向燈、后右轉向燈、后左霧燈、后右霧燈、左后制動燈、右后制動燈、駐車制動指示燈、左牌照燈、右牌照燈、后刮水電機、后除霜器等。我們將它們分成左右兩組,分別接到兩側的QL4電路板上。GZ32發送報文頭和響應場,QL4接收主機發送的LIN報文幀,將數據場各bit所攜帶的信息提取出來,驅動車燈和電機。由于用電器比較少,數據場只需要2個字節就足夠。數據場的字節分配如圖 5所示,各個bit反映相關用電器的狀態,1表示燈亮和電機工作(電機采用直流電機,上電即可工作,故也只有0/1兩種狀態),0表示燈滅和電機不工作。

圖5 LIN數據場字節分配
兩個LIN從機分別接在兩個LIN主機上,而且它們都是只接收報文幀,不用發送響應場,故可用相同的標志符0x1C。另外還有睡眠和喚醒2個命令幀,分別用LIN總線保留的標識符0x3C和0x00來識別。
4 結束語
本文作者的創新點在于:根據LIN總線特點,設計了MCU+LIN接口芯片的LIN節點硬件結構,實現了主機/從機任務的LIN網絡通訊,并根據長安SC6350微車制定了LIN應用層協議,構建了一個基于CAN/LIN總線的車身網絡(該車身網絡已經通過國家863 項目組的驗收),為我國汽車LIN總線A類網絡高層通訊協議的制定奠定了基礎。
參考文獻
【1】 LIN Specification Package,Revision 2.0[S].Motorola Co,Sep.23.2003
【2】 佟為明,孫凡金,趙志衡.LIN總線技術[J].低壓電器,2004(2):26-29
【3】 徐春艷,劉桂霞等.基于LIN總線車燈控制系統的研制[J],吉林大學學報.2005(4):467-471
【4】 侯樹梅,張云龍,蘇劍.一種新型汽車車身控制低端通訊總線LIN[J],汽車技術.2003(11):5-7
【5】 張廣斌,方凱,陳效肯.電動汽車網絡協議應用的研究[J],微計算機信息.2005(9Z):115-116







評論