基于FPGA和單片機的位移測量裝置的設計

4 系統軟件程序設計
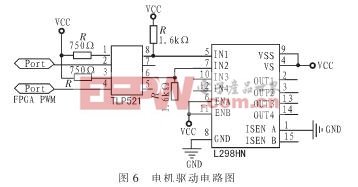
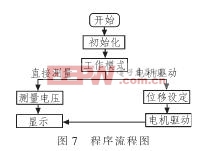
本系統由單片機與FPGA共同控制實現,FPGA主要用于ADC時序的控制以及數據的運算,單片機則用來實現人機的交互。程序采用結構化設計思想,軟件采用模塊化設計,主程序中調用各子程序,有專門的數據處理子程序、信號發生器子程序、掃描鍵盤子程序等。除了數據運算和顯示外,本系統還附加了自校正功能,即通過比較兩路信號的幅值控制電機的正轉和反轉,最終使鐵芯停在參考零的位置。圖7為程序流程。
5 系統測試與結果分析
5.1 使用儀器及型號
PC機:Intel奔騰D,主頻:2.5 G,內存:1 G;偉福仿真機:E51/S;直流穩壓穩流電源:SGl733SB3A;雙蹤數字存儲示波器:TEKT-RONLX TDS1002。
5.2 測試內容與結果
在電路調試的過程中,針對各個模塊分別進行調試,調試結果效果不錯,調試數據表格省略。進行整機調試時,測 量了A、B、C 3點的信號波形。其中C處的信號波形良好,無失真。A、B 2點的輸出的直流信號無紋波抖動,而且數值準確。對于位移測量,實驗數據如表l和表2所示。對該位移測量結果進行分析,可以看出位移測量的精度較高,最大誤差是0.5 mm,測量范圍是-20~20 mm,總體來說,整個系統的完成情況較好。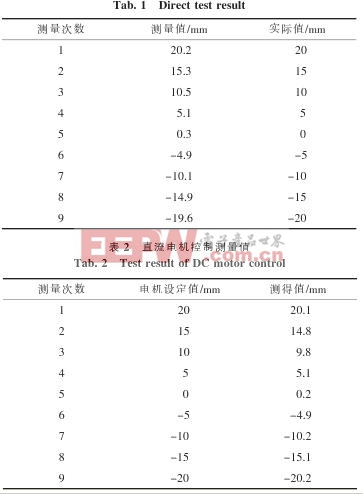
6 結束語
該系統測量位移范圍擴展到-20~20 mm,實際測量到自制差動變壓器的近似線性范圍約為-24~24 mm,能夠實現較高的精度測量,同時也能夠達到不錯的動態范圍,但線性度不是很好,這主要是受線圈繞制的非理想均勻、對稱以及鐵芯規格不理想等因素的**,但通過軟件校正可大大提高位移測量的精度,而且線性度的穩定性也會有提高。












評論