基于單片機的智能泊車系統設計方案

0 引 言
隨著我國汽車數量逐年急劇增多,泊車位、停車場的數量卻跟不上其增長的步伐,越來越多的人為如何泊車而發愁。日益擁擠的泊車環境要求人們對汽車的泊車技術更加地嫻熟,這就更加重了人們工作之外的緊張情緒,降低了人們的生活質量。因此,如何解決泊車過程中的不便利,消除安全隱患,迅速、準確、安全地將汽車停靠到合適的位置,逐漸引起了人們的關注。
1 系統的工作原理及功能
智能泊車系統可分為控制部分和信號檢測部分。
其中信號檢測部分包括障礙物檢測模塊,光源檢測模塊和速度檢測模塊;控制部分包括控制器模塊,電機控制模塊。智能泊車系統基本模塊方框圖如圖1所示。
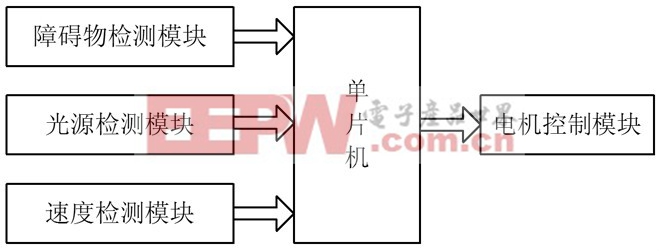
圖1 智能泊車系統基本框圖
系統工作原理如下:在小車啟動之后,通過霍爾傳感器A44E進行小車的速度檢測,對小車進行智能限速,小車行進過程中通過紅外光電傳感器避障,車庫系統發送光源指示信號,光敏三極管接收車庫指示信息,使小車到達指定車庫后,停車。
1.1 單片機最小系統設計
AT89C52是51系列單片機的一種,是一個低功耗,高性能,CMOS 8位單片機,片內含8KB的可反復擦寫的FLASH只讀程序存儲器和256B的隨機存取數據存儲器(RAM),由ATMEL公司采用高密度、非易失性存儲技術生產,兼容標準MCS-51指令系統,片內置通用8位中央處理器和FLASH存儲單元,片內有ROM/EPROM,因此,這種芯片構成的最小系統簡單可靠,只要將單片機接上時鐘電路和復位電路即可。
1.2 避障電路設計
紅外光電式傳感器具有非接觸、響應快、性能可靠、體積小、安裝輕便等諸多特點,因此在工業自動化裝置和智能小車中獲得廣泛應用。本設計中采用的光電避障傳感器是HS0038B.紅外光電接收電路工作原理為:當接收到載波頻率為38kHz的脈沖調制信號時,首先,HS0038B內的紅外敏感元件將脈沖調制紅外光信號轉換成電信號,再由前置放大器和自動增益控制電路進行放大處理,然后通過帶通濾波器進行濾波,濾波后的信號由解調電路進行解調,最后由輸出電路進行反向放大并輸出低電平;未接收到載波信號時,電路則輸出高電平。紅外發射電路由555定時電路產生方波,對紅外發射管進行調制。
1.3 A44E測速電路設計
霍爾傳感器A44E在測速系統中的主要作用是車輪轉速采集。車輪每轉一周,磁鐵經過A44E一次,A44E的第3腳就輸出一個脈沖信號,脈沖信號的周期與電機的轉速有下列關系:
式中:n為電機轉速;P 為電機轉一圈的脈沖數;T 為輸出方波信號的周期。
脈沖信號作為單片機AT89C52的外中斷信號,從P3.2口輸入。
1.4 電機驅動電路設計
動作執行單元為驅動小車左右輪的兩個減速直流電機,控制它們的轉速,就控制了小車的運動狀態。但是由動作控制單元發出的控制信號非常微弱,無法直接驅動直流電機,須匹配設計合理的驅動電路,常用的驅動電路為H 橋。在設計過程中發現,由于三極管導通、關斷的時間不統一,導致用三極管搭建的H 橋在電機電流換向的時候經常發生微短路,使得三極管發熱現象很嚴重,整個電路電源波動很大,非常耗電。因此,本設計最終采用了集成H 橋L298.除此之外,在設計過程中發現電機轉動產生的反向電動勢會嚴重影響傳感器的輸出狀態,將錯誤的路徑信息送給處理器,導致小車經常產生錯誤動作。因此,本設計采用了雙電源供電,即傳感器和芯片共用一組電源,電機專用一組電源,中間信號的傳輸采用了4N25光耦電路進行電氣隔離。
1.5 光源引導電路設計
本設計采用光敏三極管作為光源檢測傳感器,因為其感光電壓變化明顯(電壓值變化在60~100mV 左右),價格便宜。光源引導模塊需要在小車前方安裝3個光敏三極管,通過車庫發出的光源信號來引導小車到指定車庫停車,使用LM324作為光源引導模塊的核心放大器件,將信號進行放大處理。
1.6 停車場系統設計
為了更好地完成小車避障、光源引導和入庫過程,停車場系統設計也是十分重要的。停車場系統設計圖如圖2所示。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理









評論