基于AT89C52的超聲波測距倒車防撞報警系統設計

引言
隨著國民經濟的高速發展,我國汽車的擁有量在大幅增加,造成道路擁堵,交通事故頻發,給人們的生命和財產安全帶來了巨大的損失。安全駕駛成為大家關注的焦點,其中汽車防撞系統(Collision Avoidance System,CAS)的設計和需求顯得非常重要和迫切。針對這種情況,設計一種響應快、可靠性高且較為經濟的汽車防撞報警系統勢在必行。
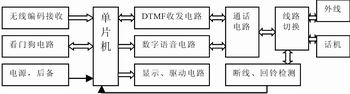
超聲波作為一種頻率超過20 kHz的機械波,其指向性強,能量消耗緩慢,在介質中傳播距離遠,因此超聲波測距法是最常見的一種距離測量方法。利用超聲波檢測距離,設計比較方便,計算處理也較簡單,而且精度也較高。本設計采用AT89C52單片機作為主控器,結合超聲波測距原理,設計了汽車倒車防撞報警系統。該系統采用軟、硬件結合的方法,具有模塊化和多用化的特點。
1 超聲波的測距原理
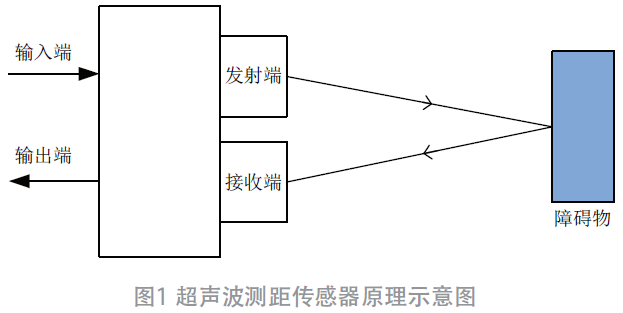
本系統選用的是壓電式超聲波傳感器。超聲波測距原理有兩種方式:共振式和脈沖反射式。因為共振式的應用要求復雜,在此使用脈沖反射式。超聲波測距原理如圖1所示。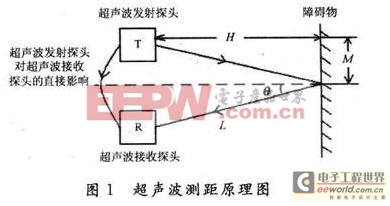
圖1中被測距離為H,兩探頭中心距離的一半用M表示,超聲波單程所走過的距離用L表示,由圖中關系可得: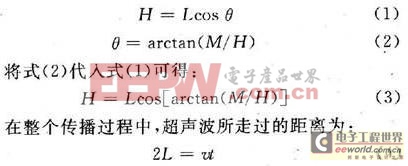
式中:v為超聲波的傳播速度;t為傳播時間,即為超聲波從發射到接收的時間。
將式(4)代入式(3)可得: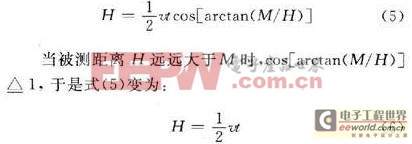
由此可見,要想測得距離H,只要測得超聲波的傳播時間t即可。



評論