智能PWM控制的機車制動控制單元的設計

1 引 言
隨著我國國民經濟的蓬勃發展和人民生活水平的日益提高,鐵路的客、貨運量將越來越大,列車牽引重量與運行速度將不斷提高。高速客運及重載貨運列車的發展對列車制動系統提出了更高更新的要求。
國外發達國家都是采用微機應用先進控制理論實現對機車制動氣缸的精確控制。而在我國機車上廣泛使用的DK-l和JZ-7型制動機只能對機車實現一些簡單的邏輯控制功能,不能實現對機車制動缸和均衡風缸的閉環控制,難以滿足機車制動控制的需要。隨著電子技術及微機控制技術應用的日漸成熟,有必要應用現代電子技術和先進的控制理論,利用微機的強大功能實現對機車的精確制動。 目前世界各國鐵路絕大多數仍采用空氣制動,要實現對氣體壓力的控制,特別是小流量壓力控制,就應考慮明顯的非線性和不確定性。另外,負載的不確定性導致了整個系統模型的不確定,經典的控制方法及依賴于具體數學模型的現代控制理論都難以實現系統控制的要求,在這種情況下,將智能控制方法和常規控制方法相結合有望取得更好的控制效果。
本文介紹了一種基于智能脈沖寬度調制(Pulse WidthModulation,PWM)控制的機車制動控制單元的設計和實現方法。對制動機氣缸的高速電控閥實王見PWM控制,也就是通過調節信號的占空比米實現對高速電控閥一定周期內開閉時間的控制。
通過建立機車制動機氣缸模糊控制規則,運用模糊推理來實現PID控制,從而實現了機車的精確制動。這樣就有效解決了目前我國的DK-1和JZ-7型制動機不能實現精確制動的問題,對提高我國機車的安全運行和信息化程度有著極大的促進作用。
2 系統硬件結構
機車制動控制單元(Brake Control Unit,BCU)主要分為以下幾個部分:模擬量輸入、模擬量輸出、數字量輸入、數字量輸出、PWM輸出、微處理器部分以及與外圍部分的通信等,系統整體結構圖如圖1所示。
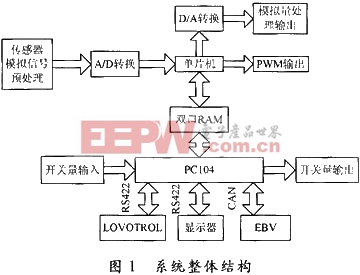
其中模擬量輸入部分主要是包括傳感器模擬信號預處理和A/D轉換,信號預處理主要是將從傳感器上獲得的4~20 mA電流信號轉換為A/D轉換所需要的電壓信號。通過處理,我們就可以得到氣缸壓力,A/D轉換的精度直接關系到氣缸壓力控制的精度。為了滿足控制的需要,在本系統中選用了16位的A/D轉換芯片,采樣實驗表明,采樣值偏差很小,在允許的誤差范圍內。
微機處理部分實際上包含了2個微處理器,一個是單片機,另外一個是PC104。他們實現不同的功能,他們之間通過雙口RAM實現高速數據通信。單片機主要是實現對模擬量A/D轉換控制、D/A轉換控制以及智能PWM控制等。由于PC104功能強大,能夠實現更強大的數據處理功能。PC104主要是將獲得的數字輸入量通過數據處理后輸出數字量。另外,通過PC104快速數據處理和軟件的強大功能還使制動控制單元具有機車制動機監控及故障檢測、診斷、顯示、告警、記錄、單機自動測試等功能。在本系統中,實現對氣缸壓力的精確控制是由單片機來完成的,PC104通過對各種信號如模擬量、數字量等信號的處理得到需要氣缸所需要達到的壓力值,單片機通過雙口RAM得到壓力值,應用智能PWM控制實現對壓力的精確控制,這一部分將在下面章節進行詳細介紹。
3 分段控制
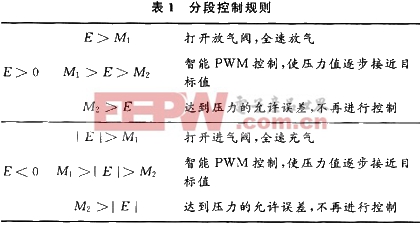
為了實現對機車制動機氣缸既能精確控制,又能夠快速達到目標值,我們對氣缸壓力實行分段控制。單片機有4路開關量輸出,分別對應制動缸的進氣閥、放氣閥和均衡風缸的進氣閥、放氣閥,輸出1代表打開閥門,0代表關閉閥門。我們以pt表示壓力目標值,pi表示當前氣缸壓力值,E表示偏差值。所以,有E=pi-pt。M1,M2表示壓力偏差的絕對值,其中M1>M2,M1表示在接近目標值的一個值,M2表示允許的最大誤差,分段控制規則如表1所示。
4 智能PWM控制
4.1 智能PID介紹
PID控制是較早發展起來的控制策略之一,由于算法簡單、魯棒性好、可靠性高而廣泛用于過程控制和運動控制中,尤其適用于能建立精確數學模型的控制系統。但由于實際工業生產過程往往是非線性和時變不確定性的,難以建立精確的數學模型,因此常規PID控制器很難達到理想控制效果。

pid控制器相關文章:pid控制器原理
pwm相關文章:pwm原理

評論