SPI接口基礎上的各種串行通信工作方式配置及驅動編程

引言
51系列單片機資源有限,當開發者面對比較復雜的控制任務時,51單片機就力不從心了。在這種情況下,用戶可以選用比較高檔的單片機機型,比如ARM系列32位單片機等來完成目標控制的任務。還有一種選擇方案,就是采用51單片機多機系統方案,用分散控制的方法來實現最終的復雜目標控制任務。
在多機系統的實現過程中,首先要解決的就是多機之間的相互通信連接問題,以保證數據在單片機之間的高效、可靠的傳遞。MCU之間的通信功能是多機系統實現的基礎,也是多機系統可靠運行的關鍵。
1 SPI接口的特點
SPI接口最大可以提供1 Mb的串行數據傳輸能力。理論上,比傳統的串行通信接口RS232通信速率高得多,因此它非常適合多CPU系統中的CPU之間的數據交換,絕大多數情況下,能夠滿足通信需求。
與RS232不同的是,SPI采用的是移位寄存器方式實現串行通信的,SPI 工作方式如圖1所示。
圖1中,MOSI(Master Out and Slaver In)和MISO(Master In and Slaver Out)為SPI接口的通信引腳。從引腳定義可以看出,無論是數據發送,還是數據接收,SPI通信過程始終應當是由主機Master控制。主從機之間的物理連接是同名端直接連接。
其工作過程是:主機對SPI接口的寫數據操作完成后,SPI啟動數據發送,數據就從主機的MOSI引腳移位輸出,按位移位到從機中;一個字節傳輸完畢后,SPI接口傳輸標志置位,供軟件開發者測試控制編程。由于每位數據傳輸最快只需要一個機器周期,故其通信速率很快。
這種通信方式,決定了SPI只能夠實現近距通信,通常通信距離為數十公分,不超過1 m,而且 SPI的通信雙方對通信過程的控制能力比較弱,在系統設計時要保證通信可靠性,必須采用固定主從、連續收發的工作模式。
而UART方式對通信過程的控制能力較強,可以是互為主從、隨機收發的工作模式。由于這個區別,決定了SPI的通信編程與傳統的RS232有本質的區別。在編程中,應當明確地定義系統中誰是主機,誰是從機,在系統工作過程中,不得變更。并且,所有的通信過程,都是由主機發動。否則,很難保證通信的可靠性。
2 基本協議的設計與實現
采用的單片機是NXP公司的P89V51RD2,其內部集成有大容量的存儲器(64 KB Flash、1 KB RAM),除此之外,還集成有3個定時計數器、UART、PCA、WDT等豐富的接口。它是一款性價比較高的51單片機,為復雜的目標控制提供了物理支持。
其內部也集成了SPI通信接口,由于SPI每位數據傳輸最快只需要一個機器周期,如果單片機系統采用12 MHz晶振,則傳輸1位數據,最短只需要1μs。而采用支持RS232標準的UART接口,若以最高9 600 bps波特率通信,傳輸1位數據需要104μs。SPI快速的數據傳輸能力,為用戶編制復雜的通信協議提供了支持。
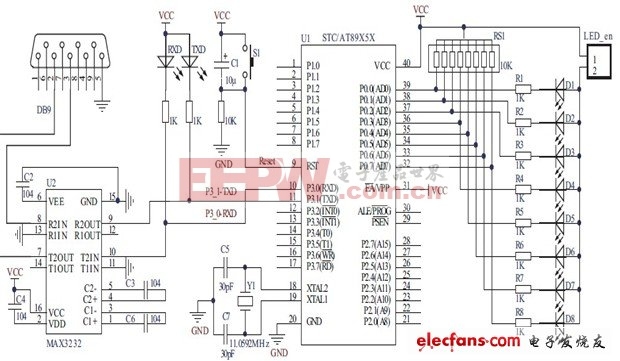
SPI通信雖然傳輸速率高,但由于其有主機、從機角色固定,連續傳輸的特點,無法滿足大多數用戶的通信要求。比如,SPI通信只能由主機單向發動,用戶怎么能夠實現主從雙方的數據雙向傳輸呢?再如,SPI通信工作過程是連續的,通信雙方又怎樣實現數據的隨機收發呢?SPI接口僅提供了一種基本的通信機制,用戶無法直接使用。用戶要使用SPI接口實現兩機數據的隨機雙向交換,就必須編制通信協議。SPI雙機電氣連接圖如圖2所示。
綜上所述,SPI基本通信協議構造的目的就是要滿足通信雙方雙向數據傳遞、數據隨機收發的要求。

數字通信相關文章:數字通信原理
通信相關文章:通信原理

評論